Tason yhtenevyyskuvaus
Tason yhtenevyyskuvaus eli tason isometria on geometriassa euklidisen tason yhtenevyyskuvaus itselleen eli kuvaus, jossa tasokuvioiden geometriset ominaisuudet kuten janojen pituus ja kulmat säilyvät. Tason yhtenevyyskuvauksia on neljää tyyppiä: yhdensuuntaissiirto eli translaatio, kierto eli rotaatio (geometria), peilaus suoran suhteen sekä peilauksen ja translaation yhdistettynä kuvauksena muodostettu liukupeilaus. Joskus mainitaan yhtenä yhtenevyyskuvauksen tyyppinä myös peilaus pisteen suuntaan, joka kuitenkin on sama kuin 90 asteen kierto.
Euklidisen tason yhtenevyyskuvaukset muodostavat ryhmän, kaksiulotteisen euklidisen ryhmän, jossa laskutoimituksena on kuvausten yhdistäminen. Jokainen tason yhtenevyyskuvaus voidaan muodostaa yhdistettynä kuvauksena enintään kolmesta peilauksesta suorien suhteen.
Translaatiossa ja rotaatiossa säilyy myös kätisyys, peilauksessa ja liukupeilauksessa sen sijaan ei, vaan niissä kuvio muuttuu peilikuvakseen tai sen kaltaiseksi.
Havainnollisia esimerkkejä
Tason yhtenevyyskuvauksia ovat kaikki tavat, joilla tasoa voidaan muuntaa ilman kuvioiden koon tai muodon muutoksia. Voidaan esimerkiksi kuvitella, että tasoa esittää läpinäkyvä muovikalvo pöydällä. Esimerkkejä yhtenevyyskuvauksista ovat tällöin:
- siirretään muovikalvoa 10 cm oikealle
- kierretään muovikalvoa 10 astetta jonkin merkityn pisteen ympäri, joka itse pysyy paikoillaan
- käännetään muovikalvo ylösalaisin nostamalla se välillä pois pöydältä. On huomattava, että jos kalvon toiselle puolelle on piirretty jokin kuvio, sen kääntämisen jälkeen kuvio näkyy peilikuvanaan.
Edellä mainitut ovat esimerkkejä translaatiosta, rotaatiosta ja peilauksesta. Näiden lisäksi on vielä yksi yhtenevyyskuvausten tyyppi, jota sanotaan liukupeilaukseksi (engl. glide reflection) ja jota käsitellään tarkemmin jäljempänä.
Sen sijaan kalvon taittaminen, leikkaaminen tai sulattaminen eivät vastaa yhtenevyyskuvauksia, eivät myöskään sen taivuttaminen, venyttäminen tai vääntäminen mutkalle.
Muodollinen määritelmä
Euklidisen tason isometria on etäisyydet säilyttävä kuvaus tasolta itselleen. Toisin sanoen se on kuvaus

jossa jokaiselle tason pisteparille p, q pätee

missä d(p, q) on pisteiden p ja q välinen tavanomainen euklidinen etäisyys.
Tason yhtenevyyskuvausten luokittelua
Voidaan osoittaa, että tason yhtenevyyskuvauksia on neljää tyyppiä. On huomattava, että alla olevat kuvaustyyppien merkinnät eivät ole täysin standardoituja.
- Translaatio, jolle käytetään merkintää Tv missä v on :n vektori. Tämän vaikutus on, että taso siirtyy v:n suuntaan. Ninpä jokaiselle tason pisteelle p on

- tai (x, y)-koordinaatistossa,


- Rotaatio, jolle käytetään merintää Rc,θ, missä θ on se tason piste, jonka ympäri tasoa kierretään ja θ kiertokulma. Koordinaatistossa rotaatio voidaan helpoimmin ilmaista muodostamalla se kahdesta operaatiosta. Ensiksikin rotaatiota origon ympäri esittää yhtälö
- Nämä matriisit ovat ortogonaalisia matriiseja, joiden determinantti on 1. Toisin sanoen ne ovat sellaisia neliömatriiseja G, joiden on transpoosi on sama kuin sen käänteismatriisi eli . (Ortogonaalisen matriisin determinantti voi olla myös −1; tällaiset tapaukset vastaavat peilauksia, kuten jäljempänä todetaan.) Rotaatiot origon ympäri muodostavat myös ryhmän, ortogonaalisen ryhmän SO(2).


- Rotaatio pisteen c ympäri voidaan muodostaa suorittamalla ensin translaatio, jossa c kuvautuu origoon, sitten rotaatio origon ympäri ja lopulta toinen translaatio, jossa origo kuvautuu jälleen pisteeseen c. Tosin sanoen
- eli


- Vaihtoehtoisesti voidaan suorittaa ensin rotaatio origon ympäri ja sitten translaatio:

- Peilaus eli peili-isometria, jolle käytetään merkintää Fc,v, missä c on tason piste ja v :n yksikkövektori. Tämä peilaa pisteen o suoran L suhteen, joka on kohtisuorassa v:tä vastaan ja kulkee c:n kautta. Suoraa L sanotaan peilausakseliksi. Jotta Fc,v:lle löytyisi kaava,p − c:n komponentti t vektorin v suunnassa määritetään pistetulon avulla,
- minkä jälkeen p:n peilaus saadaan vähennyslaskulla


- Jokaista rotaatiota origon ympäri ja peilausta origon kautta kulkevan suoran suhteen vastaa jokin ortogonaalinen matriisi, jonka determinantti on joko 1 tai −1, ja kääntäen. Nämä muodostavat ortogonaalisen ryhmän O(2). Niissä tapauksissa, joissa determinantti on −1, saadaan:
- mikä voidaan muodostaa yhdistämällä peilaus x-akselin suhteen ja rotaatio kulman θ verran, tai yhtäpitävästi peilaus sellaisen suoran suhteen, joka muodostaa x-akselin kanssa kulman θ/2. Peilaus yhdensuuntaisen suoran suhteen vastaa sitä, että tähän lisätään jokin sitä vastaan kohtisuora vektori.

- Liukupeilaus, jolle käytetään merkintää Gc,v,w, missä c on jokin tason piste, v yksikkövektori :ssa ja w v:n kanssa kohtisuorassa oleva vektori, joka ei ole nollavektori. Tämä on yhdistetty kuvaus, jonka muodostavat peilaus c:n ja v:n määräämän suoran kanssa sekä translaatio w:n suunnassa. Toisin sanoen
- eli,
- (Pitää myös paikkansa, että
- toisin sanoen tulos on sama, jos translaatio ja heijastus suoritetaan päinvastaisessa järjestyksessä.)



- Vaihtoehtoisesti voidaan ensin kertoa ortogonaalisella matriisilla, jonka determinantti on −1 ja joka vastaa peilausta origon kautta kulkevan suoran suhteen, ja sen jälkeen suorittaa translaatio. Tuloksena on tällöinkin liukupeilaus, paitsi siinä erikoistapauksessa, että translaatio on kohtisuorassa peilaussuoraa vastaan, missä tapauksessa tulos on sama kuin peilattaessa erään toisen, alkuperäisen peilaussuoran kanssa yhdensuuntaisen suoran suhteen.
Identtinen kuvaus kuvaa jokaisen pisteen itselleen, toisin sanoen I(p) = p kaikille pisteille p. Sekin voidaan käsittää erikoistapaukseksi sekä translaatiosta että rotaatiosta. Se on ainoa yhtenevyyskuvaus, joka kuuluu useampaan kuin yhteen edellä luetelluista tyypeistä.
Kaikki tason yhtenevyyskuvaukset voidaan muodostaa kertomalla ortogonaalisella matriisilla ja lisäämällä jokin vakiovektori; jos matriisin determinantti on 1, kyseessä on rotaatio, translaatio tai identtinen kuvaus, ja jos se on −1, on kyseessä liukupeilaus tai peilaus.
"Satunnainen" yhtenevyyskuvaus, jota esittää paperipalan nostaminen pöydältä ja sen palauttaminen sille mielivaltaiseen kohtaan, on "melkein varmasti" rotaatio tai liukupeilaus, sillä näillä on kolme vapausastetta. Tämä pätee riippumatta todennäköisyysjakaumasta niin kauan kuin θ ja lisätyn vektorin suunta ovat riippumattomia ja tasaisesti jakautuneet ja translaatiovektorin pituudella on jatkuva jakauma. Puhdas translaatio ja puhdas peilaus suoran suhteen ovat erikoistapauksia, joilla on vain kaksi vapausastetta, kun taas identtisellä kuvauksella niitä ei ole yhtään.
Peilausten yhdistelmät
Euklidisessa tasossa on seuraavat mahdollisuudet.
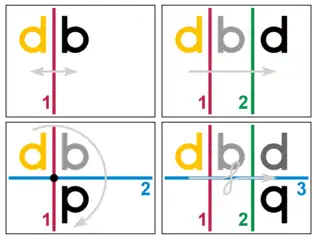
- [d ] Identtinen kuvaus
- Kaksi peilausta saman suoran suhteen palauttaa jokaisen pisteen alkuperäiselle paikalleen. Kaikki pisteet ovat kuvauksen kiintopisteitä riippumatta siitä, minkä suoran suhteen taso peilataan kahteen kertaan.
- [db] Peilaus
- Peilissä oikea ja vasen käsi vaihtuvat, kätisyys vaihtuu, ja samaan tapaan käy tason peilauksessa suoran suhteen. Matemaattisin termein ilmaistuna, topologinen orientaatio kääntyy päinvastaiseksi. Peilaussuoralla olevat pisteet pysyvät paikoillaan. Peilaus kahden eri suoran suhteen johtaa aina eri tulokseen.
- [dp] Kierto eli rotaatio
- Kaksi toisensa leikkaavaa suoraa, joiden suhteen peilaus suoritetaan. Niillä on yksi yhteinen piste, joka pysyy paikoillaan. Kaikki muut pisteet kiertyvät sen ympäri kulman verran, joka on kaksi kertaa peilaussuorien välinen kulma. Mitkä tahansa kaksi peilaussuoraa, jotka leikkaavat toisensa samassa pisteessä ja joiden välinen kulma on sama, johtavat samaan tulokseen, kunhan peilaukset suoritetaan samassa järjestyksessä.
- [dd] Yhdensuuntaissiirto eli translaatio
- Kaksi peilaussuoraa, jotka eivät leikkaa toisiaan, ovat yhdensuuntaisia. Jokainen piste siirtyy saman verran, kaksi kertaa peilaussuorien välisen etäisyyden verran, ja samaan suuntaan. Mikään piste ei pysy paikallaan. Mitkä tahansa kaksi tietyn suuntaista peilaussuoraa, joilla on sama keskinäinen välimatka, johtavat samaan tulokseen, kunhan peilaukset suoritetaan samassa järjestyksessä.
- [dq] Liukupeilaus
- Kolme peilaussuoraa. Jos ne kaikki ovat yhdensuuntaisia, voidaan valita yksi suora, jonka suhteen peilattaessa tulos olisi sama. Muussa tapauksessa voidaan löytää kolme suoraa, joista kaksi on yhdensuuntaisia ja kolmas niitä vastaan kohtisuorassa ja jonka suhteen peilattaessa tulos olisi sama. Tuloksena on peilauksen ja peilaussuoran suuntaisen translaation yhdistelmä. Kiintopisteitä ei ole.
Kolme peilausta riittää
Useampien peilaussuorien lisääminen ei tuo tasossa lisää mahdollisuuksia, sillä ne voidaan aina järjestää uudestaan siten, että osa niistä kumoaa toistensa vaikutukset.
- Todistus. Yhtenevyyskuvauksen määrittää yksikäsitteisesti kolme pistettä, jotka eivät ole samalla suoralla, ja niiden kuvapisteet. Oletetaan, että p1, p2 ja p3 kuvautuvat pisteisiin q1, q2 ja q3; tämän aikaansaamiseksi voidaan seuraavalla tavalla muodostaa kolme peilaussuoraa. Jos p1 ja q1 ovat kaksi eri pistettä, valitaan peilaussuoraksi niiden välisen janan keskinormaali. Nyt p1 kuvautuu pisteeseen q1 ja molemmat muut peilaussuorat voidaan valita niin, että ne kulkevat q1:n kautta ja pitävät sen paikoillaan. Käytetään pisteiden p2 ja p3 kuvapisteille tässä peilauksessa merkintöjä p2′ ja p3′.
- Jos q2 ei ole sama kuin p2′, valitaan pisteessä q1 olevan kulman puolittaja uudeksi peilaussuoraksi. Kun p1 ja p2 nyt ovat paikoillaan, p3 on pisteessä p3′′; ja jos se ei ole paikoillaan, kolmas peilaus pisteiden q1 ja q2 kautta kulkevan suoran suhteen kuvaa sen pisteeseen q3. Täten jokainen yhtenevyyskuvaus voidaan muodostaa yhdistämällä enintään kolmesta peilauksesta. mot.
Tunnistus
Mikä näistä yhtenevyyskuvausten tyypeistä kulloinkin on kyseessä, voidaan seuraavan taulukon mukaisesti tunnistaa sen perusteella, säilyttääkö se kätisyyden vai vaihtaako se sen, ja onko sillä ainakin yksi kiintopiste. (Identtistä kuvausta ei oteta huomioon.)
Säilyykö kätisyys? Kyllä Ei Kiintopiste? Kyllä Rotaatio Peilaus Ei Translaatio Liukupeilaus
Ryhmän rakenne
Tason yhtenevyyskuvausten ryhmää sanotaan euklidiseksi ryhmäksi. Yhtenevyyskuvaukset, jotka muodostetaan parittomasta määrästä peilauksia - itse peilaus sekä liukupeilaus - vaihtavat aina keskenään vasemman ja oikean. Yhtenevyyskuvauksella sanotaan olevan parillinen tai pariton pariteetti riippuen siitä, voidaanko muodostaa yhdistämällä parillisesta vai parittomasta määrästä peilauksia. Parilliset yhtenevyyskuvaukset - identtinen kuvaus sekä translaatio ja rotaatio, eivät koskaan tee niin. Ne voidaan käsittää tason jäykiksi liikkeiksi, ja ne muodostavat tämän ryhmän normaalin aliryhmän. Sen enempää koko euklidinen ryhmä kuin tämä aliryhmäkään eivät ole Abelin ryhmiä; esimerkiksi jos taso peilataan kahden yhdensuuntaisen suoran suhteen eri järjestyksissä, tuloksena on kaksi translaatiota päinvastaisiin suuntiin.
- Todistus: Identtinen kuvaus on yhtenevyyskuvaus; mikään ei muutu, joten etäisyydetkään eivät muutu. Ja jos yksi kuvaus ei muuta etäisyyksiä, ei sitä voi muuttaa kaksi, kolme tai useampikaan tällainen kuvaus yhdistettynä; näin ollen yhtenevyyskuvausten yhdistetty kuvaus on jälleen yhdistetty kuvaus, ja yhtenevyyskuvausten joukko on suljettu niiden yhdistämisen suhteen. Identtinen kuvaus on myös identiteetti kuvausten yhdistämisessä, ja yhdistäminen on liitännäinen; sen vuoksi yhtenevyyskuvaukset muodostavat puoliryhmän. Ryhmässä jokaisella alkiolla on myös käänteisalkio. Peilauksen käänteiskuvaus on sama peilaus itse, eli peilaukset ovat involuutioita. Ja koska jokainen yhtenevyyskuvaus voidaan esittää peilauksista yhdistettynä kuvauksena, sen käänteiskuvaus saadaan suorittamalla nämä peilaukset päinvastaisessa järjestyksessä. On huomattava, että jos kaksi perättäistä peilausta saman suhteen, jotka kumoavat toisensa, jätetään huomiotta, suoritettavien peilausten lukumäärä pienenee parillisen luvun verran, mikä säilyttää yhdistetyn kuvauksen pariteetin, jota paitsi identtisellä kuvauksella on parillinen pariteetti. Tämän vuoksi kaikki yhtenevyyskuvaukset muodostavat ryhmän, ja parilliset yhtenevyyskuvaukset muodostavat sen aliryhmän. (Parittomien yhtenevyyskuvausten joukkoon identtinen kuvaus ei kuulu, joten ne eivät muodosta aliryhmää.) Tämä aliryhmä on normaali aliryhmä, sillä jos kahden parittoman yhtenevyyskuvauksen väliin lisätään parillinen yhtenevyyskuvaus, tuloksena on parillinen yhtenevyyskuvaus. mot.
Koska parillisten kuvausten aliryhmä on normaali, se on homeomorfismin ydin, ja sen tekijäryhmä on isomorfinen ryhmän kanssa, johon kuuluvat yksi peilaus ja identtinen kuvaus.
Kuvausten yhdistäminen
Yhtenevyyskuvausten yhdistäminen muuttaa niiden tyyppejä usein eri tavoin. Identtistä kuvausta voidaan pitää joko kahden peilauksen yhdistettynä kuvauksena tai ei yhdenkään; kummassakaan tapauksessa se ei muuta muiden kuvausten tyyppiä. Kahden peilauksen yhdistäminen antaa tulokseksi translaation tai rotaation, tai erikoistapauksessa identtisen kuvauksen, joka kuuluu triviaalilla tavalla molempiin ryhmiin. Peilaus yhdistettynä jompaankumpaan näistä voi palautua yhdeksi peilaukseksi, mutta ellei niin tapahdu, tuloksena on ainoa kolmesta peilauksesta yhdistetty kuvaus, liukupeilaus. Kahden translaation yhdistäminen johtaa aina kuvaukseen, joka itsekin on translaatio. Monimutkaisempia ovat tapaukset, joissa ainakin toinen kuvauksista on rotaatio. Tiedämme, että rotaation yhdistäminen joko toiseen rotaatioon tai translaatioon on aina parillinen yhtenevyyskuvaus. Translaation ja rotaation yhdistettynä kuvauksena saadaan toinen rotaatio, jossa kiertokulma on sama mutta kiintopiste toinen. Sen sijaan kahden rotaation yhdistetty kuvaus voi olla joko rotaatio tai translaatio. Usein sanotaan, että kahden rotaation yhdistetty kuvaus johtaa rotaatioon, ja Euler todisti tätä koskevan teoreeman kolmiulotteisessa avaruudessa; tämä kuitenkin pätee vain rotaatioille, joilla on yhteinen kiintopiste.
Translaatioiden, rotaatioiden ja ortogonaaliset aliryhmät
Edellä olevan perusteella voidaan yhtenevyyskuvausten ryhmälle muodostaa uusia aliryhmiä. Erään sellaisen muodostavat kaikki translaatiot, ja myös kaikki rotaatiot saman pisteen ympäri muodostavat aina aliryhmän. Molemmat ovat parillisen aliryhmän aliryhmiä, ja translaatioiden aliryhmä on sen normaali aliryhmä. Koska translaatiot ovat normaali aliryhmä, ne voidaan sulkea pois, jolloin jäljelle jää sellaisten yhtenevyyskuvausten aliryhmä, joilla on kiintopiste, ortogonaalinen ryhmä.
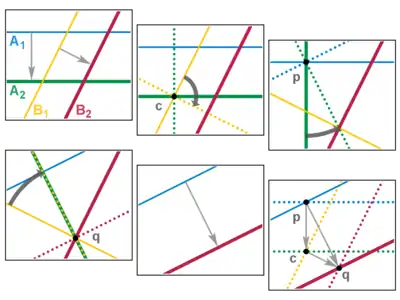
- Todistus. Jos kahdella rotaatiolla on yhteinen kiinteä piste, ne kaksi suoraa, joiden suhteen suoritettavista peilauksista yhdistämällä jälkimmäinen saadaan, voidaan valita siten, että niistä ensimmäinen on sama kuin ensimmäisen rotaation jälkimmäisen peilauksen peilaussuora. Täten neljästä peilauksesta kaksi keskimmäistä kumoavat toisensa ja jäljelle jäävät vain ensimmäinen rotaation ensimmäinen ja jälkimmäisen rotaation jälkimmäinen peilaus. Niinpä kahden sellaisen rotaation yhdistetty kuvaus, joilla on yhteinen kiinteä piste, on rotaatio, jolla on sama kiinteä piste niiden kummankin kanssa ja jonka kiertokulma on niiden kiertokulmien summa.
- Jos kaksi translaatiota ovat yhdensuuntaisia, ne kaksi suoraa, joiden suhteen suoritettavista peilauksista yhdistämällä jälkimmäinen saadaan, voidaan valita siten, että niistä ensimmäinen on sama kuin ensimmäisen translaation jälkimmäisen peilauksen peilaussuora. Täten neljästä peilauksesta kaksi keskimmäistä kumoavat toisensa ja jäljelle jäävät vain ensimmäisen translaation ensimmäinen ja jälkimmäisen translaation jälkimmäinen peilaus. Niinpä kahden yhdensuuntaisen translaation yhdistetty kuvaus on niiden kanssa yhdensuuntainen translaatio, jossa siirretty matka on niissä kummassakin siirrytyn matkan summa. Jos taas translaatiot eivät ole yhdensuuntaiset ja peilaussuorat ovat A1, A2 (ensimmäinen translaatio) sekä B1, B2 (jälkimmäinen translaatio), leikkaavat A2 ja B1 jossakin. Merkitään niiden leikkauspistettä c:llä, ja yhdistelemällä peilaukset toisin saadaan kahdesta keskimmäisestä yhdistämällä rotaatio pisteen c ympäri. Sama rotaatio voidaan saada myös kiertämällä näitä kahta peilaussuoraa 90° pisteen c, jolloin niiden välinen kulma pysyy ennallaan. Nyt A1 ja A2′ leikkaavat toisensa 90°:n kulmassa jossakin pisteessä, jolle käytetään merkintää p, ja samoin B1′ ja B2 leikkaavat toisensa jossakin pisteessä q. Yhdistellään peilaukset jälleen uudestaan siten, että ensimmäistä paria kierretään pisteen p ympäri siten, että B2″ kulkee q:n kautta ja vastaavasti toista paria pisteen q ympäri siten, että A1″ kulkee p:n kautta. Nyt kaksi keskimmäistä peilaussuoraa yhtyvät ja peilaukset kumoavat toisensa, kun taas ensimmäinen ja viimeinen ovat edelleen yhdensuuntaiset. Näin ollen kahden translaation yhdistetty kuvaus on translaatio silloinkin, kun ne eivät ole yhdensuuntaiset. Lisäksi ne kolme pistettä, joiden ympäri peilaussuoria kierrettiin, muodostavat kolmion, joka esittää vektorien yhteenlaskua: 2(p c) + 2(c q) = 2(p q). mot.
Konstruointi aliryhmän avulla
Aliryhmän rakenne tarjoaa toisen keinon, jolla mikä tahansa yhtenevyyskuvaus voidaan muodostaa:
- Valitaan kiinteä piste ja jokin sen kautta kulkeva suora peilaussuoraksi
- Jos yhtenevyyskuvaus on pariton, suoritetaan peilaus, muussa tapauksessa ei.
- Jos on tarpeen, suoritetaan rotaatio (kierto) valitun pisteen ympäri
- Jos on tarpeen, suoritetaan translaatio (yhdensuuntaissiirto)
Tämä toimii, koska translaatiot muodostavat kaikkien yhtenevyyskuvausten normaalin aliryhmän, jonka tekijäryhmänä on ortogonaalinen ryhmä, ja rotaatiot annetun pisteen ympäri muodostavat ortogonaalisen ryhmän normaalin aliryhmän, jonka tekijäryhmänä on yksi peilaus.
Diskreetit aliryhmät

Tähän saakka käsitellyt aliryhmät ovat kaikki olleet, paitsi äärettömiä, myös jatkuvia, Lien ryhmiä. Jokainen aliryhmä, johon kuuluu ainakin yksi ei-triviaali translaatio, on ääretön, mutta ortogonaalisella ryhmällä on myös äärellisiä aliryhmiä. Esimerkiksi säännöllisen viisikulmion symmetrioita ovat rotaatiot sellaisten kulmien verran, jotka ovat 72°:n (360° / 5) monikertoja sekä peilaukset sen sivujen keskinormaalien suhteen. Nämä muodostavat ryhmän D5, jossa on 10 alkiota. Sillä on aliryhmä, C5, johon kuuluu viisi rotaatiota mutta eivät peilaukset. Nämä ryhmät kuuluvat kahteen perheeseen, Dn ja Cn, jotka voidaan muodostaa jokaiselle kokonaisluvulle n > 1. Yhdessä nämä perheet muodostavat kaksiulotteiset pisteryhmät.
Translaatio ei itsensä kanssa yhdistettynä johda identtiseen kuvaukseen, suoritettiinpa se kuinka monta kertaa tahansa, mutta erään yhtenevyyskuvausten aliryhmän muodostavat kaikki translaatiot, jotka saadaan suorittamalla annettu translaatio tai sen käänteiskuvaus mielivaltaisen monta kertaa. Tämä ryhmä on isomorfinen kokonaislukujen ryhmän kanssa. Aliryhmiä saadaan myös niistä kuvauksista, jotka saadaan toistamalla kahta translaatiota, kumpaakin toisistaan riippumatta mielivaltaisen monta kertaa. Nämä muodostavat tason hilaryhmän.
Näitä kahdenlaisia diskreettejä ryhmiä voidaan myös yhdistellä. Diskreetit rotaatiot ja peilaukset annetun pisteen ympäri ja diskreetit translaatiot yhdessä muodostavat niin sanottuja friisiryhmiä (engl. frieze group) ja tapettiryhmiä (engl. wallpaper group). Mielenkiintoista kylläkin, vain pieni osa ryhmistä, jotka liittyvät kiinteisiin pisteisiin, ovat yhteensopivia diskreettien translaatioiden kanssa. Itse asiassa tämä yhteensopivuus asettaa siinä määrin rajoittavia ehtoja, aina isomorfismeja myöten, että on olemassa vain seitsemän erilaista friisiryhmää ja 17 erilaista tapettiryhmää. Esimerkiksi viisikulmion symmetriat, D5, eivät ole yhteensopivia translaatioiden diskreetin ryhmän kanssa. (Missä tahansa useampiulotteisessa avaruudessa on niin ikään vain äärellinen määrä tällaisia kristallografisia ryhmiä, mutta niiden lukumäärä kasvaa nopeasti; esimerkiksi kolmessa ulottuvuudessa on 320 ja neljässä ulottuvuudessa 4783 ryhmää.)
Yhtenevyyskuvaukset kompleksitasolla
Jos tason pisteitä käsitellään kompleksilukuina, tason yhtenevyyskuvaukset ovat joko muotoa

tai

missä a ja ω ovat eräitä kompleksilukuja ja |ω| = 1. Tämä on helppo todistaa: jos a = f(0) ja = f(1) − f(0) ja jos määritellään


on g yhtenevyyskuvaus, g(0) = 0, ja g(1) = 1. Nähdään helposti, että g on joko identtinen kuvaus tai kompleksikonjugaatti, ja todistettava lause seuraa tästä sekä siitä, että f(z) = a + ωg(z).
Tämä liittyy yksinkertaisella tavalla edellä esitettyyn tason yhtenevyyskuvausten luokitteluun sillä
- tyyppiä z → a + z olevat funktiot ovat translaatiota;
- tyyppiä z → z olevat funktiot ovat rotaatiota (kun |ω| = 1);
- kompleksikonjugaation ottaminen on peilaus.
Lähteet
Kirjallisuutta
- Kivelä, Simo K.: Algebra ja geometria. Espoo: Otatieto, 1989. ISBN 951-672-103-6.