Ominaisarvo, ominaisvektori ja ominaisavaruus
Ominaisarvo, ominaisvektori ja ominaisavaruus ovat alun perin lineaarialgebran piirissä kehitettyjä toisiinsa verrattavia käsitteitä. Olkoon A annettu vektoriavaruuden V lineaarikuvaus. A:n ominaisvektori on vektori v, jonka suunta ei muutu kuvauksessa A. Kerrointa, jolla kuvavektori kutistuu tai kasvaa tässä kuvauksessa, sanotaan vektorin ominaisarvoksi. Usein kuvaus voidaan luonnehtia kokonaan ominaisarvojensa ja ominaisvektoreidensa avulla. Ominaisavaruus on joukko ominaisvektoreita joilla on sama ominaisarvo.[1]
Matriisin ominaisarvojen summaa kutsutaan matriisin jäljeksi (trace). Ominaisarvojen tulo vastaa matriisin determinanttia.
Nämä käsitteet ovat merkittävässä roolissa useilla puhtaan ja sovelletun matematiikan osa-alueilla, kuten lineaarialgebrassa, funktionaalianalyysissä ja jopa useissa epälineaarisissa tilanteissa.
Määritelmät
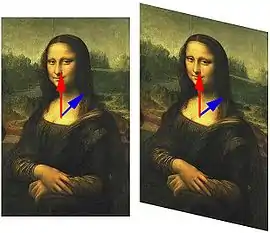
Avaruuden muunnokset, kuten translaatio, rotaatio, peilaus ja homotetia, tai näiden yhdisteet, voidaan havainnollistaa graafisesti näyttämällä miten ne muuntavat vektoreita. Vektorit voidaan havainnollistaa koordinaatistossa nuolin, jotka osoittavat yhdestä pisteestä toiseen.
- Muunnoksen ominaisvektorit ovat vektoreita, joiden suunta ei muutu muunnoksessa.
- Ominaisvektorin ominaisarvo on muunnoksen skaalauskerroin, eli kuvavektorin pituus jaettuna alkuperäisen vektorin pituudella.
- Ominaisavaruus sisältää kaikki ne ominaisvektorit, joilla on sama ominaisarvo.
- Ominaisvektorin geometrinen kertaluku on vastaavan ominaisavaruuden dimensio.
- Muunnoksen spektri on sen ominaisarvojen muodostama joukko.
Esimerkiksi kolmiulotteisen avaruuden rotaatio on vektori, joka sijaitsee sillä rotaatioakselilla, minkä suhteen rotaatio suoritetaan. Vastaava ominaisarvo on yksi ja vastaava ominaisavaruus sisältää kaikki vektorit jotka ovat yhdensuuntaisia tämän akselin kanssa. Tässä yksiulotteisessa avaruudessa avaruuden geometrinen kertaluku on yksi. Vastaavasti spektri koostuu vain yhdestä reaaliluvusta.
Esimerkkejä
Kun Maa pyörähtää akselinsa ympäri, muuttuu myös Maan keskipisteestä alkavan vektorin suunta, mikäli vektori ei osoita samaan suuntaan kuin pyörähdysakseli tai ole nollavektori. Tarkastellaan Maan pyörähtämistä tunnin välein. Nyt huomataan, että ainoastaan Maan napoihin osoittavat vektorit pysyvät koko ajan paikoillaan, joten vain ne ovat muunnoksen ominaisvektorit. Lisäksi vektorin pituus pysyy koko ajan muuttumattomana, joten sen ainoa ominaisarvo on 1.
Toinen fysikaalinen esimerkki saadaan kun janan yksi piste kiinnitetään ja jana venytetään pituudeltaan kaksinkertaiseksi. Tämän muunnoksen ominaisarvo on 2. Jokainen vektori kiinnitetystä pisteestä janan mielivaltaiseen pisteeseen on ominaisvektori ja ominaisavaruus on näiden vektorien muodostama joukko.
Ominaisarvoyhtälö
Ominaisarvoyhtälö on matriisin ominaisarvoista muodostettu polynomiyhtälö. Sen ratkaisuna saadaan matriisin ominaisvektorit, jotka ovat käyttökelpoisia monissa sovelluksissa.
Olkoon vλ :n ominaisvektori ja λ sitä vastaava ominaisarvo. Tällöin ominaisarvoyhtälö on määritelmän mukaan

- ,

missä on vektori, joka saadaan kun muunnosta sovelletaan vektoriin vλ.

Olkoon lineaarikuvaus. Tarkastellaan tämän vektoriavaruuden kantaa. Tällöin ja vλ voidaan esittää matriisien avulla tämän kannan suhteen. Matriisiesityksen mukaan on tällöin voimassa
- ,

missä kertolaskuna on matriisien kertolasku. Tämä on yhtäpitävää n lineaarisen yhtälön kanssa, missä n on kannan vektoreiden lukumäärä. Tässä yhtälössä sekä ominaisarvo λ, että v:n n komponenttia ovat tuntemattomia.
Ominaisfunktio
Toisinaan on kuitenkin mahdotonta kirjoittaa ominaisarvoyhtälö matriisimuotoon. Tämä tilanne on esimerkiksi silloin, kun vektoriavaruus on ääretönulotteinen. Muunnoksesta ja avaruudesta, mihin muunnosta sovelletaan, riippuen voidaan ominaisarvoyhtälö esittää differentiaaliyhtälönä. Jos on differentiaalioperaattori, kutsutaan ominaisvektoreita yleensä differentiaalioperaattorin ominaisfunktioiksi. Esimerkiksi derivointi on lineaarinen muunnos, joten sen avulla voidaan muodostaa differentiaalioperaattori.
Tarkastellaan derivointia ajan suhteen. Nyt sen ominaisfunktiot toteuttavat ominaisyhtälön

- ,

missä λ on funktion ominaisarvo. Tällainen ajan funktio on vakio jos λ=0, kasvava jos λ on positiivinen ja vähenevä jos λ on negatiivinen. Esimerkiksi kanien ideaalipopulaatiomalleissa jäniskanta lisääntyy sitä voimakkaammin, mitä enemmän jäniksiä on, joten tässä tapauksessa parametri λ on positiivinen.
Ominaisarvoyhtälön ratkaisu on N=eλt, eli funktio on differentiaalioperaattorin d/dt ominaisfunktio ominaisarvonaan λ. Jos λ on negatiivinen, ratkaisua kutsutaan eksponentiaalisesti väheneväksi, muutoin eksponentiaalisesti kasvavaksi. λ:n arvo voi olla mikä tahansa kompleksiluku. Operaattorin d/dt spektri on siten koko kompleksitaso. Tässä esimerkissä vektoriavaruus, missä operaattori d/dt toimii, on derivoituvien yksimuuttujisten funktioiden avaruus. Tämän avaruuden dimensio on ääretön, sillä ei ole mahdollista ilmaista kaikkia derivoituvia funktioita äärellisen monen kannan funktion lineaarisena yhdisteenä. Kuitenkin annettua ominaisarvoa λ vastaa yksiulotteinen ominaisavaruus. Se on kaikkien funktioiden N=N0eλt, missä N0 on mielivaltainen vakio, muodostama joukko. Alkuarvo saadaan sijoittamalla yhtälöön t=0.
Spektrilause
Spektrilauseessa kuvastuu ominaisarvojen ja -vektoreiden käyttökelpoisuus karakterisoida lineaarinen muunnos yksikäsitteisesti. Yksinkertaisimmassa muodossaan spektrilause sanoo, että tietyillä ehdoilla vektorin lineaarinen muunnos voidaan esittää lineaarikombinaationa ominaisvektoreista, joiden kertoimet saadaan kertomalla vektorin ominaisarvot skalaarilla ja ottamalla tästä tuloksesta pistetulo sen vektorin kanssa, johon lineaarista muunnosta sovelletaan. Matemaattisesti tämä voidaan kirjoittaa muodossa
- ,

missä ja tarkoittavat :n ominaisvektoreita ja -arvoja. Yksinkertaisimmat tapaukset, jossa lause on voimassa, on tapaus missä lineaarinen muunnos on annettu reaaliluvun ja symmetrisen matriisin avulla tai kompleksiluvun ja hermiittisen matriisin avulla.


Jos määritellään muunnoksen n:s potenssi suorittamalla muunnosta n kertaa peräkkäin, saadaan määriteltyä muunnoksen polynomit. Yleisempi versio lauseesta on, että jokainen :n polynomi on muotoa

Lause voidaan yleistää myös muille funktioille kuin polynomeille, kuten esimerkiksi analyyttisille funktioille ja Borelin funktioille.
Matriisin ominaisarvojen ja -vektoreiden laskeminen
Oletetaan, että haluamme laskea annetun matriisin ominaisarvot. Nämä voidaan laskea karakteristisen polynomin avulla jos matriisi on pieni. Suurilla matriiseilla polynomin juurten tarkkojen arvojen laskenta on usein mahdotonta, jolloin on käytettävä numeerisia menetelmiä. Tämä siksi, että ominaisarvoyhtälö on tällöin korkeampaa kuin neljättä astetta ja Abelin-Ruffinin lauseen mukaan tällaiselle polynomiyhtälölle ei ole olemassa yleistä ratkaisukaavaa.
Symbolinen laskenta
- Ominaisarvojen selvittäminen
Karakteristinen polynomi on tärkeä työkalu neliömatriisin ominaisarvojen selvittämisessä. λ on annetun neliömatriisin A ominaisarvo vain jos lineaarisella yhtälöryhmällä (A – λI) v = 0 (I on yksikkömatriisi) on nollavektorista poikkeava ratkaisu v, jota kutsutaan A:n ominaisvektoriksi. Koska yhtälöllä on olemassa nollasta eroava ratkaisu v vain jos matriisin determinantti on nolla, saadaan ominaisarvot yhtälöstä
- .[2]

Yhtälö p(λ) = det(A – λI) on polynomiaalinen λ:n suhteen, sillä determinantit ovat määritelmän mukaan summia tuloista. Tämä on A:n karakteristinen polynomi; matriisin ominaisarvot ovat sen karakteristisen polynomin nollakohtia.
Matriisin A kaikki ominaisarvot saadaan ratkaisemalla yhtälö . Jos A on n×n-matriisi, on n:ttä astetta ja A:lla voi olla siten korkeintaan n ominaisarvoa. Toisaalta, algebran peruslauseen mukaan tällä yhtälöllä on täsmälleen n juurta, kun juurien kertaluvut otetaan huomioon. Kaikilla paritonasteisilla reaalipolynomeilla on reaalijuuri, joten n×n-matriiseilla on aina vähintään yksi ominaisvektori kun n on pariton. Funktioteorian perusteista seuraa myös, että reaalimatriisin epäreaaliset ominaisarvot esiintyvät toistensa konjugaattipareina.


- Ominaisvektoreiden muodostaminen
Kun ominaisarvot λ tiedetään, ominaisvektorit saadaan ratkaisemalla yhtälö
- .

Esimerkki neliömatriisista, jolla ei ole reaalisia ominaisarvoja, on 90 asteen kierto myötäpäivään:
- ,

jonka karakteristinen polynomi on . Tämän polynomin nollakohdat ovat toistensa kompleksikonjugaatit i ja -i. Siten reaalisia ominaisvektoreita ei ole.

Numeerinen laskenta
Käytännössä suurten matriisien ominaisarvoja ei lasketa karakteristisen polynomin avulla. Polynomin laskeminen itsessään on työlästä ja polynomin juuren tarkkaa arvoa ei ole aina mahdollista selvittää. Juurten approksimointiin on kehitetty tehokkaita numeerisia algoritmeja, mutta pienetkin numeeriset virheet voivat kasaantua, jolloin matriisin oikeat ominaisvektorit voivat olla todellisuudessa hyvinkin erilaisia numeerisiin tuloksiin verrattuna. Siten ominaisarvoja lasketaankin käytännössä iteratiivisillä menetelmillä. Yksinkertaisin menetelmä on ns. potenssimenetelmä: valitaan satunnaisesti vektori v ja lasketaan yksikkövektorit
- , , , ...



Tämä jono suppenee lähes aina kohti itseisarvoltaan suurinta ominaisarvoa vastaavaa ominaisvektoria. Tämä algoritmi on helppo toteuttaa, mutta ei ole aina käytännöllinen. Kuitenkin suositut numeeriset lineaarialgebran algoritmit, kuten QR-algoritmi, perustuu tähän.
Algebrallinen kertaluku
Matriisin A ominaisarvon λ algebrallinen kertaluku on λ:n kertaluku A:n karakteristisen polynomin nollakohtana. Tosin sanoen jos λ on eräs polynomin juuri, sen kertaluku on karakteristisen polynomin tekijöihinjaossa esiintyvän termien (x − λ) lukumäärä. n×n-matriisilla on n ominaisarvoa algebrallinen kertaluku huomioon ottaen, koska n×n-matriisien karakteristinen polynomi on n:ttä astetta. Ominaisarvoa kutsutaan yksinkertaiseksi jos sen algebrallinen kertaluku on 1.[2]
Matriisilaskennan oppikirjoissa saattaa törmätä seuraavanlaiseen lauseeseen:
- "Matriisin A ominaisarvot ovat 4, 4, 3, 3, 3, 2, 2, 1."
Tämä tarkoittaa sitä, että ominaisarvon 4 algebrallinen kertaluku on 2, ominaisarvon 3 kertaluku on 3, kahden kertaluku on kaksi ja yhden yksi. Tämäntyyppinen kirjoitusasu on käytössä, sillä algebrallinen kertaluku on oleellinen käsite monissa matriisilaskennan tulosten todistuksissa.
Algebrallinen kertaluku voidaan myös ajatella dimensiona. Se voidaan ajatella yleistettynä ominaisavaruutena, joka on matriisin (λI − A)k nolla-avaruus kaikilla riittävän suurilla k. Se on siis yleistettyjen ominaisvektoreiden avaruus, missä yleistetty ominaisvektori on mikä tahansa vektori, joka kuvautuu nollaksi jos vektori kerrotaan matriisilla λI − A riittävän monta kertaa. Ominaisvektori on yleistetty ominaisvektori, joten jokainen ominaisavaruus sisältyy vastaavaan yleistettyyn ominaisvektoriin. Tämän ominaisuuden perusteella voidaan todistaa, että ominaisarvon geometrinen kertaluku on aina korkeintaan yhtä suuri kuin algebrallinen kertaluku. Tätä ei tule sekoittaa yleistettyyn ominaisarvo-ongelmaan.
Esimerkki: Olkoon

A:lla on vain yksi ominaisarvo, nimittäin λ = 1. A:n karakteristinen polynomi on , joten ominaisarvon algebrallinen kertaluku on 2. Toisaalta vastaava ominaisavaruus on pelkästään yksikkövektorin virittämä, joten geometriseksi kertaluvuksi saadaan 1.


Hajotuslause
Hajotuslause on erikoistapaus spektrilauseesta tietyille matriiseille. Tämä lause esitetään usein koordinaatistomuunnosten avulla. Jos U on kääntyvä matriisi, se voidaan tulkita koordinaatiston muunnoksena. Tässä uudessa koordinaatistossa vektoria merkitään . Nämä vektorit saadaan soveltamalla koordinaatiston muunnosta vektoriin v, . Tästä koordinaatistosta päästään takaisin alkuperäiseen koordinaatistoon muunnoksen avulla. Soveltamalla muunnoksia , ja identiteettiin , saadaan , missä . Tämä on A:n esitys uudessa kannassa. U:n sarakkeista voidaan tällöin lukea uudet kantavektorit. Hajotuslauseesta seuraa, että jos U:sta voidaan valita n lineaarisesti riippumatonta A:n ominaisvektoria, niin tällöin matriisi on diagonaalinen eli lävistäjämatriisi ja sen lävistäjäalkiot ovat A:n ominaisarvot. Tällöin A:ta sanotaan diagonalisoituvaksi matriisiksi. Esimerkki ei-diagonalisoituvasta matriisista on kohdassa algebrallinen kertaluku esiintyvä matriisi A.









On olemassa useita hajotuslauseen yleistyksiä, joita voidaan käyttää, jos matriisi ei ole diagonalisoituva. Eri hajotelmat toimivat eri tapauksissa.
- Singulaariarvohajotelmassa , missä on lävistäjämatriisi, mutta U ei ole välttämättä yhtä suuri kuin V.
- Jordanin normaalimuodossa , missä ei ole lävistäjämatriisi, mutta on sellaisessa yksinkertaisessa muodossa, jossa sen nollasta poikkeavat alkiot ovat lävistäjällä ja yksi nollasta poikkeava alkio lävistäjän yläpuolella.
- Jokainen matriisi A voidaan esittää yksikäsitteisesti muodossa A = S + N, missä S on diagonalisoituva, N on nilpotentti (eli Nq=0 jollakin q>0) ja S kommutoi N:n kanssa, (SN=NS).
- Jokainen kääntyvä matriisi A voidaan esittää yksikäsitteisesti muodossa A = SJ, missä S on diagonalisoituva ja J on unipotentti (eli J:n karakteristinen polynomi on muotoa (λ-1)n jollakin kokonaisluvulla n), ja S kommutoi J:n kanssa.




Muita lauseita
Spektri on invariantti yhtenevyysmuunnosten suhteen: matriiseilla A ja P−1AP on samat ominaisarvot kaikilla matriiseilla A ja kaikilla kääntyvillä matriiseilla P. Spektri on niin ikään invariantti transpoosin suhteen: matriiseilla A ja AT on samat ominaisarvot.
Matriisi on kääntyvä jos ja vain jos sillä ei ole ominaisarvonaan nollaa.
Matriisi on diagonalisoituva jos ja vain jos sen ominaisarvojen algebralliset ja geometriset kertaluvut vastaavat toisiaan. Erityisesti n×n-matriisi, jolla on n eri ominaisarvoa, on diagonalisoituva.
Vektoriavaruus, missä matriisi toimii, on aina suora summa yleistetyistä ominaisavaruuksista (eli on näiden avaruuksien virittämä), jotka ovat lineaarisesti riippumattomat. Tämä pätee kaikille tavallisille ominaisavaruuksille vain jos ne yhtyvät yleistetyssä ominaisavaruudessa, toisin sanoen vain jos matriisi on diagonalisoituva.
Spektristä voidaan saada lisätietoa jos matriisi on erityistä muotoa
- Hermiittisen matriisin (A = A*) ominaisarvot ovat reaaliset. Edelleen positiivisesti definiitin matriisin (v*Av > 0 kaikilla vektoreilla v) ominaisarvot ovat positiivisia.
- Vinohermiittisen matriisin (A = −A*) ominaisarvot ovat puhtaasti imaginaarisia.
- Unitaarisen matriisin (A−1 = A*) ominaisarvojen itseisarvo on yksi.
- Kolmiomatriisin ominaisarvot ovat matriisin diagonaalilla olevat alkiot. Tämä pätee erityisesti diagonaalisille matriisille.
Yleisesti matriisin jälki, toisin sanoen päädiagonaalin alkioiden summa, on yhtä suuri kuin matriisin ominaisarvojen summa ja matriisin determinantti on matriisin ominaisarvojen tulo. Tulossa on otettava huomioon ominaisarvojen kertaluvut.
Olkoon A m×n matriisi, jolle m ≤ n ja B n×m matriisi. Tällöin BA:n ominaisarvot ovat samat kuin AB:n. Muut n − m ominaisarvoa ovat nollia.
Konjugaattinen ominaisvektori
Konjugaattinen ominaisvektori on vektori, jonka arvo muunnoksen jälkeen on skalaari kertaa vektorin konjugaatti. Tässä skalaaria kutsutaan lineaarikuvauksen konjugaattiseksi ominaisarvoksi. Konjugaattiset ominaisvektorit ja -arvot antavat oleellisesti saman tiedon kuin tavalliset ominaisvektorit ja -arvot, mutta ne esiintyvät toisissa koordinaatiston muunnoksissa kuin tavalliset ominaisvektorit ja -arvot. Vastaava konjugaattinen ominaisarvoyhtälö on

Esimerkiksi koherentissa sähkömagneettisessa hajaantumisteoriassa lineaarinen muunnos A esittää hajaantunutta säteilyä, ja ominaisvektorit esittää sähkömagneettisen aallon polaarisaatiotiloja. Myös esimerkiksi optiikassa koordinaatisto on valittu siten, että syntyvä ominaisarvoyhtälö on tavallista muotoa, kun taas tutkat muodostavat tietokoneelle ominaisarvoyhtälöitä, jotka ovat konjugaattista muotoa.
Yleistetty ominaisarvoyhtälö
Yleistetty ominaisarvoyhtälö on muotoa
- ,

missä A ja B ovat matriiseja. Yleistetyt ominaisarvot saadaan ratkaisemalla yhtälö

missä on reaali- tai kompleksiluku. Jos B on kääntyvä, voidaan alkuperäinen yhtälö kirjoittaa muodossa


joten yleistetty ominaisarvoyhtälö pelkistyy tavalliseksi ominaisarvoyhtälöksi. Useimmiten kuitenkin matriisin kääntäminen aiheuttaa numeerista virhettä, joten ylempää yleistettyä ominaisarvoyhtälöä on suositeltavaa käyttää sovelluksissa.
Jos A ja B ovat symmetrisiä reaalikertoimisia matriiseja, on A:n ja B:n ominaisarvot reaaliset. Tätä ei kuitenkaan havaita helposti jälkimmäisestä muodosta, sillä matriisi ei ole välttämättä symmetrinen vaikka A ja B olisivat.

Alkiot renkaasta
Tapauksesta, missä neliömatriisin A alkiot ovat jonkun renkaan alkioita, kutsutaan λa oikeaksi ominaisarvoksi jos on olemassa nollasta poikkeava sarakevektori x siten, että Ax=λx, tai vasemmaksi ominaisarvoksi jos on olemassa nollasta poikkeava rivivektori y, jolle yA=yλ.
Jos rengas on kommutatiivinen, vasemmat ja oikeat ominaisarvot yhtyvät, joten voidaan puhua pelkästään ominaisvektorista. Aina näin ei kuitenkaan ole, esimerkiksi jos kerroinrenkaana on kvaternioiden muodostama rengas.
Ääretönulotteiset avaruudet
Jos vektoriavaruus on ääretönulotteinen, voi olla hyödyllistä määritellä käsite spektriarvo. Spektriarvot ovat joukko skalaareita λ jolle Greenin operaattori ei ole määritelty.

Jos λ on :n ominaisarvo, on λ myös :n spektriarvo. Käänteinen ei päde, kaikki spektriarvot eivät ole ominaisarvoja. On jopa olemassa operaattoreita Hilbertin ja Banachin avaruuksissa, joilla ei ole ainuttakaan ominaisvektoria. Tämä voidaan nähdä seuraavasta esimerkistä. Hilbertin avaruuden (avaruus, jonka muodostavat kaikki skalaarijonot joille suppenee) bilateraalisella siirrolla ei ole ominaisarvoja, mutta on spektriarvoja.



Funktionaalianalyysissä käsite spektrin operaattori määritellään joukoksi annetun spektrin spektriarvoja. Tätä käsitettä käytetään paljon sirontateoriassa.
Ääretönulotteisissa avaruuksissa operaattorin spektri voi olla diskreetti tai jatkuva. Edellinen tapaus esiintyy, jos spektri on numeroituva joukko skalaareita, jälkimmäinen kun joukko on ylinumeroituva. Eksponentiaalinen kasvu tai hajoaminen tuottaa jatkuvan spektrin, kun taas esimerkiksi värähtelevä jousi diskreetin. Vetyatomin malleissa taas esiintyy molempia. Vetyatomin perustila vastaa diskreettiä spektriä, kun taas vedyn ionisoitumista kuvaava malli tuottaa jatkuvan spektrin.
Sovelluksia
- Schrödingerin yhtälö

Esimerkki ominaisarvoyhtälöstä, missä muunnos esitetään differentiaalioperaatioiden avulla, on ajasta riippumaton kvanttimekaniikan Schrödingerin yhtälö

missä H, Hamiltonin operaattori, on toisen kertaluvun differentiaalioperaattori ja , aaltofunktio, on yksi funktion ominaisfunktioista, jota vastaava ominaisarvo E" vastaa tilan energiaa.

Toisaalta tapaus, missä etsitään vain perustilan ratkaisua Schrödingerin yhtälölle, esiintyy usein kvanttikemiassa. Etsimme suuretta neliöllisesti integroituvien funktioiden avaruudesta. Koska tämä avaruus on Hilbertin avaruus, jossa on hyvin määritelty skalaaritulo, voidaan muodostama niin sanottu perusjoukko, jossa ja H voidaan esittää yksiulotteisena vektorina ja matriisina. Tällöin Schrödingerin yhtälö voidaan esittää matriisimuodossa.
Diracin bra-ket-merkintätapaa käytetään paljon tässä yhteydessä korostamaan eroa vektorin tai tilan ja sen esityksen välillä. Tällöin Schrödingerin yhtälö kirjoitetaan muotoon , ja suuretta kutsutaan H:n ominaistilaksi (toisinaan käytetään myös merkintää ), joka nähdään muunnoksena pikemminkin kuin erityisenä differentiaalioperaattoreiden esityksenä. Yllä olevassa yhtälössä ymmärretään vektorina, joka saadaan soveltamalla muunnosta H vektoriin .




- Molekulaariset radat
Kvanttimekaniikassa, erityisesti atomi- ja molekyylifysiikassa, Hartree-Fock teoria atomisista ja molekulaarisista radoista voidaan määrittää Fock-operaattori ominaisvektorina. Vastaavat ominaisvektorit esittävät Koopmanin teorian ionisoitumispotentiaaleja. Tässä yhteydessä termiä ominaisvektori käytetään tavanomaista laajemmassa mielessä, koska Fockin operaattori riippuu eksplisiittisesti orbitaaleista ja niiden ominaisarvoista. Jos tätä halutaan korostaa, voidaan puhua implisiittisestä ominaisarvoyhtälöstä. Tällaiset ominaisarvoyhtälöt ratkaistaan usein iteroimalla, tässä tapauksessa käytetty menetelmä on nimeltään itsekonsistentti kenttä -menetelmä. Kvanttikemiassa Hartree-Fock -yhtälöt esitetään usein ei-ortogonaalisena perusjoukkona. Tämä erityinen yleistetty ominaisarvoyhtälö on nimeltään Roothaanin yhtälö.
- Ominaisnaamat
Kuvankäsittelyssä jonkun henkilön naamaa käsitellessä naama voidaan ajatella joukkona vektoreita, joiden komponentit kuvaavat kunkin pikselin kirkkautta. Tämän vektoriavaruuden dimensio on pikseleiden lukumäärä. Normalisoitujen kuvien muodostamaa kovarianssimatriisia kutsutaan ominaisnaamaksi. Näistä yhdistellä eri naamojen tunnuspiirteitä, jolloin esimerkiksi ominaisnaaman kuvan pakkaus on tehokasta. Menetelmää käytetään ihmisten tunnistamisessa.
- Inertiatensori
Mekaniikassa jäykän kappaleen pääakseleiden muodostaman inertiatensorin ominaisvektoreista voidaan lukea kappaleen inertiamomentit. Inertiatensori mahdollistaa kappaleen koordinaattien laskemisen, kun kappale pyörii painopisteensä ympäri.
- Kuormitustensori
Kiinteän kappaleen mekaniikassa kuormitustensori on symmetrinen, joten se voidaan hajottaa diagonaalitensoriksi, jonka ominaisarvot voidaan lukea diagonaalilta ja jonka ominaisvektorit muodostavat tensorin kannan. Diagonaalisuuden perusteella tensorin kaikki komponentit ovat pääkomponentteja.
- Verkon ominaisarvot
Verkkoteoriassa verkon ominaisarvot määritellään verkon vieruslistamatriisin A ominaisarvoiksi, tai nykyään yhä useammin verkon Laplacen matriisin , missä T on diagonaalimatriisi, joka sisältää verkon särmien asteet, ominaisarvoiksi. Verkon pääominaisarvoa käytetään arvioimaan kuinka yhtenäinen verkko on. Menetelmää käyttää esimerkiksi Googlen PageRank-algoritmi arvioimaan hakusanojen ja www-sivujen asiasisällön vastaavuutta.

Lähteet
- Thompson, Jan & Martinsson, Thomas: Matematiikan käsikirja, s. 291–292. Helsinki: Tammi, 1994. ISBN 951-31-0471-0.
- Pitkäranta, Juhani: Calculus Fennicus – TKK:n 1. lukuvuoden laaja matematiikka (2000–2013) (pdf) (s. 844–845) 2015. Helsinki: Avoimet oppimateriaalit ry. ISBN 978-952-7010-12-9 (painettu), ISBN 978-952-7010-13-6 (pdf). Viitattu 17.7.2020.
Kirjallisuutta
- Thompson, Jan & Martinsson, Thomas: Matematiikan käsikirja. Helsinki: Tammi, 1994. ISBN 951-31-0471-0.
- Roger A. Horn ja Charles R. Johnson, Matrix Analysis, Cambridge University Press (1985). ISBN 0-521-30586-1 (hardback), ISBN 0-521-38632-2 (paperback).
- John B. Fraleigh ja Raymond A. Beauregard, Linear Algebra (3rd edition), Addison-Wesley Publishing Company (1995). ISBN 0-201-83999-7 (international edition).
- Claude Cohen-Tannoudji, Quantum Mechanics, Wiley (1977). ISBN 0-471-16432-1. (Chapter II. The mathematical tools of quantum mechanics.)
- Kivelä, Simo K.: Matriisilasku ja lineaarialgebra. Helsinki: Otatieto, 1984. ISBN 951-671-368-8.
- Pitkäranta, Juhani: Calculus Fennicus – TKK:n 1. lukuvuoden laaja matematiikka (2000–2013) (pdf) 2015. Helsinki: Avoimet oppimateriaalit ry. ISBN 978-952-7010-12-9 (painettu), ISBN 978-952-7010-13-6 (pdf).