Zeitkonstante
Die Zeitkonstante (mit dem Formelzeichen (griech. tau) oder ) ist eine charakteristische Größe eines linearen dynamischen Systems, das durch eine gewöhnliche Differentialgleichung oder durch eine zugehörige Übertragungsfunktion beschrieben wird. Sie hat die Dimension einer Zeit; ihre Maßeinheit ist meist die Sekunde.



nach einem Eingangssprung.
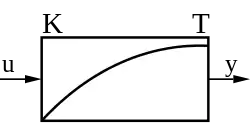
Ein dynamisches System ist eine Funktionseinheit zur Verarbeitung und Übertragung von Signalen; die Systemeingangsgröße ist als Ursache und die Systemausgangsgröße als zeitliche Auswirkung definiert. Typische Eingangssignale zur Prüfung des Systemverhaltens sind die Impulsfunktion, Sprungfunktion und Anstiegsfunktion.


In der Elektrotechnik ist das Zeitverhalten eines Verzögerungsgliedes 1. Ordnung (z. B. eines RC-Glied-Tiefpasses) mit einer Sprungantwort mit exponentiellem asymptotischem Verlauf allgemein bekannt. Dabei bestimmt die Zeitkonstante den zeitlichen Verlauf. Nach Ablauf einer Zeit von ca. 3 Zeitkonstanten hat das Ausgangssignal ca. 95 % der Größe des Eingangssignals erreicht, wenn die Systemverstärkung ist.


Grundsätzlich hängt der zeitliche Verlauf des Ausgangssignals eines Übertragungssystems beliebiger Ordnung von der Art des Übertragungssystems und des Eingangssignals ab und bezieht sich nicht nur auf Zeitverzögerungsglieder (-Glieder).

Der Begriff Zeitkonstante ergibt sich bei der Beschreibung eines linearen dynamischen Systems durch eine gewöhnliche Differentialgleichung mit konstanten Koeffizienten. Zur leichteren Berechnung des zeitabhängigen Systemverhaltens wird die systembeschreibende Differentialgleichung der Laplace-Transformation unterzogen und daraus das Signalverhältnis als Übertragungsfunktion gebildet.
Die Übertragungsfunktion in der Zeitkonstantendarstellung entsteht wie folgt:
- Laplace-Transformation der gewöhnlichen Differentialgleichung höherer Ordnung,
- Bildung der Übertragungsfunktion .

- Die Polstellen und Nullstellen der Übertragungsfunktion sind die wichtigsten Kenngrößen des Systemverhaltens.


- Faktorisierung der Polynome in die Pol-Nullstellendarstellung:
- Umrechnung der Pol-Nullstellendarstellung durch Zahlenwerte der Pole und Nullstellen in die Zeitkonstantendarstellung,
- Die Werte der Pole und Nullstellen eines Linearfaktors können drei Formen annehmen: null, negativ reell, negativ konjugiert komplex.

- Damit können im Zähler und Nenner der Übertragungsfunktion insgesamt unterschiedliche Grundformen von Linearfaktoren und Faktoren 2. Ordnung mit unterschiedlichem Systemverhalten entstehen.
- .


Die Zeitkonstante entspricht dem Koeffizienten vor der komplexen Laplace-Variable . Sie errechnen sich allgemein aus dem Reziprokwert einer negativen reellen Polstelle oder einer Nullstelle des Nennerpolynoms oder Zählerpolynoms der Übertragungsfunktion als:[1]



- bzw. .


Bestimmung der Zeitkonstanten aus den Polynomen eines linearen dynamischen Übertragungssystems höherer Ordnung
Systembeschreibungen durch Übertragungsfunktionen können entstehen durch:
- Laplace-Transformation der systembeschreibenden gewöhnlichen Differenzialgleichung zu einer Übertragungsfunktion,
- Komplexe Spannungsteiler aus einem rückwirkungsfreien Impedanzverhältnis, (Beispiel: RC-beschaltete Operationsverstärker),
- Systemidentifikation mittels Sprung- oder Impulsantwort.
Zur einfacheren Berechnung und zum leichteren Verständnis wird die systembeschreibende gewöhnliche Differenzialgleichung einer Laplace-Transformation unterzogen und ist damit algebraisch berechenbar. Dabei wird nach dem Laplace-Differentiationssatz eine Ableitung 1. Ordnung der Differenzialgleichung durch die Laplace-Variable als komplexe Frequenz ersetzt. Höhere Ableitungen n-ter Ordnung werden entsprechend der Ordnungszahl durch ersetzt.


Beispiel einer gewöhnlichen Differentialgleichung höherer Ordnung eines Übertragungssystems mit konstanten Koeffizienten und :



Diese allgemeine Form der Differentialgleichung wird einer Laplace-Transformation unterzogen:
- .

Durch Anwendung des Laplace-Differentiationssatzes auf die systembeschreibende gewöhnliche Differentialgleichung entsteht die Übertragungsfunktion . Mittels der Pol- und Nullstellenbestimmung des Zähler- und Nennerpolynoms entsteht die faktorielle Darstellung (Linearfaktoren) der Übertragungsfunktion.
Die Übertragungsfunktion G(s) wird aus dem Verhältnis der Ausgangsgröße zur Eingangsgröße gebildet. Dabei dürfen keine Anfangswerte der inneren Energiespeicher (Zustandsraumdarstellung) des Systems bestehen.

Die Laplace-Variable ist eine unabhängige Variable im komplexen Frequenzbereich (Bildbereich, s-Bereich) mit als Realteil und als Imaginärteil. Sie erlaubt beliebige algebraische Operationen im s-Bereich, ist aber nur ein Symbol für eine vollzogene Laplace-Transformation und enthält keinen Zahlenwert. Exponenten von s entsprechen dem Grad der Ableitung der Differentiale.



Zur Bestimmung der elementaren Einzelsysteme einer Übertragungsfunktion G(s) höherer Ordnung werden die Polynome des Zählers und Nenners durch Nullstellenbestimmung faktorisiert.

Wenn Zahlenwerte der Koeffizienten vorliegen, können mit verschiedenen Methoden die Pole und Nullstellen berechnet werden. Dazu eignet sich die sogenannte pq-Formel für Systeme 2. Ordnung. Fertige im Internet verfügbare Programme für Systeme bis 4. Ordnung können mit dem Aufruf: „Nullstellen (Lösungen) von Polynomen bestimmen“ benutzt werden.

Die Pole (Nullstellen des Nenners) und Nullstellen (Nullstellen des Zählers) der Übertragungsfunktion sind die wichtigsten Kenngrößen des Systemverhaltens. Sie sind entweder Null (fehlendes Endglied der Differentialgleichung), reell []; und [] oder konjugiert komplex [] und [].





Zur Bestimmung der Zeitkonstanten werden die Polynome der Übertragungsfunktion durch Nullstellenbestimmung in Linearfaktoren und Faktoren 2. Ordnung zerlegt. Wenn Zahlenwerte für die Koeffizienten der Polynome gegeben sind, können die Polynome durch die Nullstellenbestimmung faktorisiert werden.
Die Zerlegung der Zähler- und Nennerpolynome höherer Ordnung durch die Pole und Nullstellen ergibt mehrfache Linearfaktoren und mehrfache Faktoren 2. Ordnung. Als Voraussetzung dazu dürfen die Polynome in der Reihenfolge der Summenelemente entsprechend der Ordnungszahl keine Lücken aufweisen.
Werden diese Faktoren als unabhängige Einzel-Übertragungsfunktionen definiert, so entstehen je nach Art der Pole und der Nullstellen folgende Elementar-Übertragungsfunktionen:
- Die Abschlußterme der Differentialgleichung sind Null: Der entstehende Linearfaktor ist eine Variable: sowohl im Zähler als auch im Nenner.
- Die Pole bzw. die Nullstellen sind negativ reell. Aus [] oder [] entsteht der Linearfaktor in Zeitkonstantendarstellung [] sowohl im Zähler als auch im Nenner.
- Die Pole bzw. die Nullstellen sind negativ konjugiert komplex. Aus [] oder [] entsteht der Faktor in Zeitkonstantendarstellung [] 2. Ordnung sowohl im Zähler als auch im Nenner.






Beispiel einer Übertragungsfunktion mit der Polynomdarstellung, der Pol-Nullstellendarstellung und der Zeitkonstantendarstellung:
- .

Zeitkonstanten der elementaren Einzelsysteme im Zähler und Nenner der Übertragungsfunktion
Die Zerlegung des Nennerpolynoms ergibt zeitverzögernd wirkende Einzelsysteme (Linearfaktoren) und verzögernd wirkende Faktoren 2. Ordnung. Die Zerlegung des Zählerpolynoms ergibt differenzierend wirkende Einzelsysteme (Linearfaktoren) und differenzierend wirkende Faktoren 2. Ordnung. Letztere haben in Kombination mit den zeitverzögernden Systemen des Nenners keinen Einfluss auf das Zeitverhalten, sondern nur auf die Signalamplituden .
- Zeitkonstanten der Linearfaktoren als Variablen mit Polen und Nullstellen gleich Null:

- Diese Linearfaktoren entstehen bei einer Laplace-Transformation einer systembeschreibenden gewöhnlichen Differentialgleichung, deren Endglieder oder fehlen.


- Aus dem Produktterm wird im Zähler und Nenner je . Die in der nachstehenden Tabelle des nächsten Abschnitts dargestellten Zeitkonstanten für das I-Glied und für das D-Glied sind aus der Definition der Regler entnommen. In Wirklichkeit entsprechen sie Proportionalitätsfaktoren oder mit der Bewertung 1, wenn keine anderen Zahlenwerte angegeben worden sind.







- Zeitkonstante der Linearfaktoren mit Polen und Nullstellen gleich :

- Die Definition der Zeitkonstante eines -Gliedes oder eines -Gliedes errechnet sich wie folgt aus den Polen und Nullstellen für Zahlenwerte mit negativen Realteilen von .


- Beispiel für die Definition einer Zeitkonstante aus dem Linearfaktor des Zählers:
- .

- Die Zeitkonstante errechnet sich allgemein aus dem Reziprokwert (Kehrwert) einer negativen reellen Nullstelle oder des Nennerpolynoms oder Zählerpolynoms der Übertragungsfunktion als:
- bzw. .
- Zeitkonstanten des Faktors 2. Ordnung mit konjugiert komplexen Polen und Nullstellen:
- Aus der Pol-Nullstellendarstellung mit negativen konjugiert komplexen Polen und Nullstellen entstehen Faktoren 2. Ordnung. Wird aus der Nullstellendarstellung für die konjugiert komplexe Nullstelle [] oder [] eingesetzt, entsteht durch quadrieren zur Vermeidung der imaginären Größen, die Zeitkonstantendarstellung:
- Faktor 2. Ordnung in Pol-Nullstellendarstellung nach dem quadrieren:
- Mit ergibt sich die Normalform der Zeitkonstantendarstellung des Faktors 2. Ordnung:
![{\displaystyle [s^{2}-2\cdot \delta \cdot s+\delta ^{2}+\omega ^{2}]}](../I/551fbde92c8ece8df34728c9909a0b6467b4fd80.svg)

![{\displaystyle [T^{2}\cdot s^{2}+2DT\cdot s+1]\qquad D={\text{Dämpfungsgrad}}\ 0<D<1}](../I/dd3c65f385e61134d1dca1f3a6d0fbee6c7555b9.svg)
- Fazit:
- Dieser Faktor 2. Ordnung gilt sowohl für das Zähler- und Nennerpolynom und lässt sich nicht in kleinere mathematische Ausdrücke zerlegen.
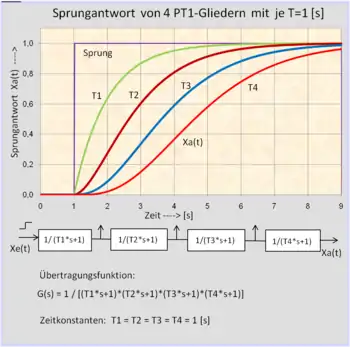
- Der Zeitverlauf einer normierten Sprungantwort eines Übertragungssystems 2. Ordnung mit konjugiert komplexen Polen (-Glied) ist von der Zeitkonstante und von der Dämpfung abhängig.


Aufstellung und Verhalten der elementaren Einzelsysteme
Durch Zuordnung dieser Faktoren im Zähler und Nenner der Übertragungsfunktionen können folgende 6 verschiedene stabile Elementarsysteme einzeln oder mehrfach entstehen:


| Benennung | I-Glied | D-Glied | -Glied | -Glied | -Glied (Schwingungsglied) | -Glied |
|---|---|---|---|---|---|---|
| Pol-Nullstellen | ||||||
| Übertragungsfunktion |












In der Zeitkonstanten-Darstellung entspricht die Zeitkonstante dem Koeffizienten vor der komplexen Laplace-Variable .
Die Berechnung des zeitlichen Verhaltens eines Gesamtübertragungssystems erfordert immer, dass die Anzahl der Faktoren des Nenners immer gleich oder größer sein muss, als die Anzahl der Faktoren im Zähler .

Differenzierende -Glieder können das Zeitverhalten von verzögernden -Gliedern bei gleichen Zeitkonstanten vollständig kompensieren. Das Gleiche gilt natürlich auch für -Glieder und -Glieder.



Testsignale zur Prüfung des Systemverhaltens:
Übliche Testsignale für Übertragungssysteme sind: Sprungfunktion, Rücksprung, Impulsfunktion, Anstiegsfunktion und Sinusfunktion. Diese Signale werden ebenfalls vom Zeitbereich in den Bildbereich Laplace-transformiert. Siehe Definition der Testsignale im nächsten Abschnitt.
Zeitverhalten differenzierender Übertragungsglieder:
Das Zeitverhalten der Sprungantwort oder der Impulsantwort eines differenzierenden Systems des Zählerpolynoms kann allein grafisch nicht dargestellt werden, weil die Änderung des Ausgangssignals im Zeitbereich stattfindet. Das Zeitverhalten eines differenzierenden Systems lässt sich nur mit einem Eingangssignal als Anstiegsfunktion grafisch darstellen. Differenzierende Systeme ohne sogenannte zeitverzögernde parasitäre -Glieder lassen sich als Hardware technisch nicht herstellen. Die dazu notwendige hinzugefügte parasitäre Zeitkonstante des zeitverzögernden -Gliedes muss wesentlich kleiner sein, als die Zeitkonstante des -Gliedes oder -Gliedes.

Zeitverhalten von Übertragungsgliedern mit konjugiert komplexen Polen (-Glieder):
Diese Übertragungsglieder 2. Ordnung enthalten Doppelpole im s-Bereich. In Abhängigkeit von der Größe der Dämpfung entsteht bei Anregung des Systems durch ein beliebiges Eingangssignal eine gedämpft schwingende Ausgangsgröße. Häufig wird die Sprungantwort als charakteristisches Verhalten dargestellt, bei dem die Ausgangsgröße exponentiell asymptotisch mit einer Schwingungsüberlagerung einen Endwert erreicht.
Bei lassen sich diese Systeme in zwei -Glieder zerlegen.

Die dem System zugehörigen Zeitkonstanten liegen in quadratischer Form vor.
Übertragungssysteme mit Linearfaktoren oder Faktoren 2. Ordnung mit positivem Realteil der Pole:
Positive Realteile der Pole und Nullstellen ergeben negative Zeitkonstanten.[2]
Übertragungsglieder mit positiven Polen bilden instabile nichtlineare Übertragungsfunktionen, die man mit z. B. mit „Instabilen T1-Gliedern“ oder mit „Instabilen T2-Gliedern“ bezeichnen kann. Auch ihnen kann man Zeitkonstanten zuordnen. Das Ausgangssignal dieser Systeme steigt nach einem positiven beliebigen Eingangssignal exponentiell progressiv bis zu einer Begrenzung an und kehrt erst zurück, wenn das Eingangssignal negativ wird (Rückkopplungseffekt). (Nähere Details siehe Regelstrecke#Charakterisierung der Regelstrecken)

Berechnung des Zeitverhaltens von Übertragungsfunktionen
- Inverse Laplace-Transformation: Das System-Ausgangsverhalten beliebiger Übertragungssysteme im Zeitbereich ist abhängig von der Übertragungsfunktion und von der Art des Eingangssignals . Mittels der inversen Laplace-Transformation lässt sich das Zeitverhalten mit Anwendung von Laplace-Transformationstafeln und dem Suchbegriff finden:
- Handelt es sich um eine normierte Sprungfunktion des Eingangssignals , so ist .




- Numerische Berechnung: Mit Hilfe der numerischen Mathematik durch Berechnung von Differenzengleichungen lassen sich für gegebene Eingangssignale die Ausgangssignale als nummerierte Folgegleichungen eines dynamischen Systems berechnen. Die Zeitkonstanten in den Differenzengleichungen bestimmen das Verhalten der Einzelsysteme.


- Differenzengleichungen berechnen in Annäherung an eine kontinuierliche Funktion schrittweise eine Wertefolge mit den Folgegliedern für ein kleines Intervall die Wertefolge an der Stelle , wobei eine Nummerierung der errechneten Werte darstellt.


![{\displaystyle k=[0,1,2,3,\dots ]}](../I/c9fe1599c4eb24c9a688785ec976333a50a69a07.svg)

![{\displaystyle y_{(k)}=[y_{(0)},y_{(1)},y_{(2)},y_{(3)}\dots ]}](../I/ac7b4fa2182ad83a16c92a856c324845e21c684c.svg)
![{\displaystyle x_{(k)}=[x_{(0)},x_{(1)},x_{(2)},x_{(3)}\dots ]}](../I/e2f512e06a2bf097e9c59973ec082f87e50bfb63.svg)

Testsignale
Den nichtperiodischen (deterministischen) Testsignalen kommt in der Systemtheorie eine zentrale Bedeutung zu. Mit ihrer Hilfe ist es möglich, ein Übertragungssystem zu testen, auf Stabilität zu prüfen oder Eigenschaften zu ermitteln.
Zur Berechnung des Zeitverhaltens eines Übertragungssystems können die transformierten Testsignale im Bildbereich anstelle mit der Übertragungsfunktion des Systems multipliziert werden. Für die Rücktransformation von in den Zeitbereich kann die gewünschte Gleichung der Systemantwort mit Hilfe der Laplace-Transformationstafeln gefunden werden.


Den Testsignalen ist gemeinsam, dass sie zum Zeitpunkt beginnen und bei eine Amplitude = 0 aufweisen. Zur Unterscheidung der Funktion der Signale werden sie mit den Zeichen δ (Impuls), Ϭ (Sprung), a (Anstieg) und s (Sinus) indiziert.


Die Testsignale werden als Eingangsgröße und als Laplace-transformierte Größe wie folgt dargestellt.
| Begriff Testsignal u(t) | Bildbereich Eingangssignal | Systemantwort y(t) |
|---|---|---|
| Impulsfunktion δ oder Stoßfunktion, Deltaimpuls |
Impulsantwort oder Gewichtsfunktion | |
| Sprungfunktion σ | Sprungantwort oder Übergangsfunktion | |
| Anstiegsfunktion oder Rampe | Anstiegsantwort oder Rampenantwort | |
| Sinusfunktion s (Periodisches Signal) | Frequenzgang |




Grundlagen der Ermittlung der Zeitkonstanten aus der gewöhnlichen Differentialgleichung 1. Ordnung
Eine lineare gewöhnliche Differentialgleichung 1. Ordnung mit konstanten Koeffizienten und lautet:
.

Die Zeitkonstante ist aus dieser Form der Differentialgleichung bereits berechenbar.

Allgemein wird für die Nullstellenbestimmung die höchste Ableitung einer Differentialgleichung freigestellt, in dem sämtliche Terme der Gleichung durch den zugehörigen Koeffizienten, in diesem Fall , dividiert werden. Damit lautet die neue mathematisch identische Differentialgleichung:

- .

Die Übertragungsfunktion G(s) dieser Differentialgleichung lautet für Anfangsbedingungen gleich Null nach Anwendung des Laplace-Differentiationssatzes:
- .

Aus dem Verhältnis der Ausgangsgröße zur Eingangsgröße ergibt sich die Übertragungsfunktion in der Zeitkonstanten-Darstellung:
- .

Bei dieser Form der Übertragungsfunktion ist die Zeitkonstante direkt ablesbar als Koeffizient vor der Laplace-Variable mit dem Verhältnis der Koeffizienten .
Setzt man für und in die Gleichung der Übertragungsfunktion ein, erhält man die Normalform der Übertragungsfunktion eines Verzögerungsgliedes (-Glied) in der Zeitkonstanten-Darstellung:



Entstehung einer gewöhnlichen Differentialgleichung 1. Ordnung aus einem Hardware-Tiefpass
Ein durch eine gewöhnliche Differentialgleichung 1. Ordnung beschriebenes Verzögerungsglied (PT1-Glied) kommt in der Natur und in der Technik am häufigsten vor. Es entsteht z. B., wenn Wärme in ein Medium fließt oder eine elektrische Spannung an ein RC-Glied angelegt wird. Es interessiert immer, wie sich die Ausgangsgröße des Systems sich als Funktion der Zeit für eine gegebene Eingangsgröße verhält. Besonders anschaulich ist das Systemverhalten für eine gegebene Eingangsgröße als Sprungfunktion.
Das in der Elektrotechnik bekannteste dynamische System, welches durch eine gewöhnliche Differentialgleichung 1. Ordnung beschrieben wird, ist das RC-Glied als Widerstands-Kondensator-Schaltung mit der Zeitkonstante .

Ue: Eingangsspannung
Ua: Ausgangsspannung
Die allgemeine mathematische Beschreibung des RC-Gliedes ergibt sich über die Anwendung der Kirchhoffschen Gesetze.
Für das Hardware-Modell als Tiefpass gilt die Maschengleichung der Spannungen:
- .

Dabei ist die Eingangsgröße, die gesuchte Ausgangsgröße. Wird für den Spannungsabfall an R die Gleichung für den Ladestrom in die obige Gleichung eingesetzt, entsteht die Differentialgleichung des RC-Gliedes als Tiefpass:





Werden die üblichen Signalbezeichnungen der Systemtheorie angewendet, lauten die neuen Signalbezeichnungen der gewöhnliche Differentialgleichung: und .


Für eine Differentialgleichung 1. Ordnung und der zugehörigen Übertragungsfunktion existiert kein Zähler- und Nennerpolynom. Es handelt sich bereits um einen Linearfaktor im Nenner der Übertragungsfunktion. Deshalb hat die Nullstelle keine Bedeutung.
Bei der üblichen Darstellung der Differentialgleichung wird die höchste Ableitung von Koeffizienten freigestellt, indem sämtliche Terme der Gleichung durch den zugehörigen Koeffizienten (hier ) dividiert werden. Damit lautet die neue mathematisch identische Differentialgleichung:


Die Übertragungsfunktion G(s) dieser Differentialgleichung lautet für Anfangsbedingungen gleich Null nach dem Differentiationssatz:
- .

Zusammengefasst als das Verhältnis der Ausgangsgrößen zur Eingangsgröße ergibt sich die Übertragungsfunktion in Zeitkonstanten-Darstellung:
.

Dabei entspricht der Koeffizient vor der Laplace-Variable der Zeitkonstante .
Entstehung der Übertragungsfunktion G(p) für einen Tiefpass (PT1-Glied) durch das Verhältnis komplexer Widerstände
Im Gegensatz zur Übertragungsfunktion kann der Frequenzgang mit eines linearen Übertragungssystems gemessen werden. Der Frequenzgang ist ein Spezialfall der Übertragungsfunktion. Die Übertragungsfunktion kann jederzeit in den Frequenzgang bei identischen Koeffizienten (Zeitkonstanten) überführt werden. Die Entstehungsgeschichten des Frequenzgangs und der Übertragungsfunktion sind unterschiedlich, die Schreibweisen können identisch bleiben.



In der dargestellten RC-Schaltung kann das Verhältnis der Ausgangsspannung zur Eingangsspannung auch als das Verhältnis der Ausgangsimpedanz zur Eingangsimpedanz definiert werden. Setzt man für die Kapazität mit den komplexen Widerstand ergibt sich für das komplexe Widerstandsverhältnis als Übertragungsfunktion :



Das Ergebnis entspricht dem aus der Differentialgleichung abgeleiteten -Glied.
Entstehung der Übertragungsfunktion G(p) für einen Hochpass durch das Verhältnis der komplexen Widerstände
Ersetzt man bei der RC-Schaltung die Kapazität C durch eine Induktivität L, entsteht bei der Betrachtung der Ein- und Ausgangsspannungen des Systems ein Hochpass 1. Ordnung. Bei Eingangssignalen mit hoher Frequenz hat die Induktivität einen hohen komplexen Widerstand. Mit fallender Frequenz fällt der induktive Widerstand ab.
In der dargestellten LC-Schaltung kann das Verhältnis der Ausgangsspannung zur Eingangsspannung auch als das Verhältnis der Ausgangsimpedanz zur Eingangsimpedanz definiert werden. Setzt man für die Induktivität mit den komplexen Widerstand ergibt sich für das komplexe Widerstandsverhältnis als Übertragungsfunktion :




Die Übertragungsfunktion des RL-Gliedes lautet mit :


Das Ergebnis entspricht einer Reihenschaltung eines -Gliedes mit einem D-Glied. Für einen normierten Eingangssprung springt das Ausgangssignal zur Zeit auf und fällt dann für exponentiell asymptotisch auf den Wert .


Das zu dieser Übertragungsfunktion zugehörige Zeitverhalten lautet für einen Eingangssprung:

Die normierte Gleichung gilt für den Eingangssprung ; .


Berechnung des Zeitverhaltens eines PT1-Gliedes nach einem Eingangssprung

Häufig wird im Zeitbereich die Ausgangsgröße der Übertragungsfunktion des -Gliedes (= -Glied) als Sprungantwort dargestellt. Der normierte Sprung für lautet Laplace-transformiert: .


Damit lautet die Übertragungsfunktion für und der Sprungantwort:

- .

Ein evtl. vorhandener Verstärkungsfaktor lässt sich nicht transformieren. Er erscheint auch nicht in den korrespondierenden Laplace-Transformations-Tabellen der Rücktransformation und kann im Zeitbereich unverändert übernommen werden.

Die Lösung im Zeitbereich der Sprungantwort ergibt sich über die Korrespondenztabellen von Laplace-Transformationstafeln für den Ausdruck:
- :

ergibt das Zeitverhalten des Verzögerungsgliedes mit dem hinzugefügten Verstärkungsfaktor .
)

Die normierte Gleichung gilt für den Eingangssprung nach . .

Zeitverhalten des Rücksprungs vom Anfangswert des -Gliedes nach .


Die normierte Gleichung gilt für den Rücksprung von nach .
Ausgangswerte eines -Gliedes des Ansprungs und des Rücksprungs für ein- bis 5-fache Zeitkonstanten:

| Zeitkonstante T | Sprungantwort Ansprung: in [%] | Sprungantwort Rücksprung: in [%] |
|---|---|---|
| T einfach | 63,2 | 36,8 |
| 86,5 | 13,5 | |
| 95,0 | 5,0 | |
| 98,2 | 1,8 | |
| 99,3 | 0,7 |




Diese normierte Gleichung gilt für den Eingangssprung . ist der Verstärkungsfaktor, .

Berechnungsbeispiel zur Bestimmung der Zeitkonstanten einer gewöhnlichen Differentialgleichung 2. Ordnung
Gegeben: Differentialgleichung eines Zeitgliedes 2. Ordnung ohne Differentiale der Eingangsgröße .
Gesucht: Übertragungsfunktion, Pole, Zeitkonstanten.
Anwendung der Laplace-Transformation der Differentialgleichung nach dem Differenziationssatz:
- .
Bildung der Übertragungsfunktion und Freistellung der höchsten transformierten Ableitung:
- .
Gegebene Zahlenwerte : und für .
Damit lautet die Übertragungsfunktion und Freistellung des höchsten Exponenten (Gleichung dividiert durch ):
- .
Im Internet (Google) bestehen Programme, die die Nullstellen von Polynomen bis 4. Ordnung errechnen lassen.
Für die Lösung der Nullstellen (Pole) eines Polynoms 2. Ordnung kann die sogenannte pq-Formel benutzt werden:
- Polynom:
- .
Damit lässt sich eine Faktorisierung des Polynoms und die Übertragungsfunktion in Zeitkonstanten-Darstellung vornehmen.
- .
Diese Gleichungen sind algebraisch identisch.
Ergebnis:
Das Übertragungssystem mit zwei -Gliedern enthält die Zeitkonstanten .
Eine Hardware-Nachbildung dieses Systems mit zwei RC-Gliedern in Reihenschaltung erfordert eine belastungsfreie Entkopplung.












Anmerkung:
Die Berechnung des Zeitverhaltens einer Übertragungsfunktion höherer Ordnung eines komplexen dynamischen Systems für eine gegebene Eingangsgröße besteht darin:
- Laplace-Transformationstafeln für die korrespondierende Zeitfunktion mit der normierten Übertragungsfunktion anzuwenden,
- oder eine faktorielle Form der Übertragungsfunktion in eine Partialbruch-Darstellung zu überführen, deren additive Terme einfach in den Zeitbereich überführt werden können,
- oder über die numerische Berechnung mit Differenzengleichungen, welche aus den Linearfaktoren der Übertragungsfunktion abgeleitet sind, um das Zeitverhalten von für eine bestimmte Eingangsgröße zu errechnen.
- Bei Übertragungsfunktionen höherer Ordnung mit einem Gemisch von negativen reellen Nullstellen und negativen konjugiert komplexen Nullstellen kann die Berechnung des Zeitverhaltens aus den Gleichungen der Laplace-Transformationstafeln mit den aufwendigen trigonometrischen Funktionen und Exponentialfunktionen recht kompliziert sein. Die numerische Berechnung mit Differenzengleichungen oder mit dem Erwerb von kommerziellen Simulations-Programmen ist erheblich einfacher.
Einzelnachweise
- Autor: Jan Lunze / Regelungstechnik 1; Springer Vieweg, Berlin, 8. Auflage 2014, ISBN 978-3-642-53943-5; Hauptkapitel: Übertragungsfunktion, Unterkapitel: Zeitkonstanten der Übertragungsfunktion.
- Autor: Jan Lunze / Regelungstechnik 1; Springer Vieweg, Berlin, 8. Auflage 2014, ISBN 978-3-642-53943-5; Kapitel: Beschreibung der Analyse linearer Systeme im Frequenzbereich.
Literatur
- Holger Lutz, Wolfgang Wendt: Taschenbuch der Regelungstechnik mit MATLAB und Simulink. 12. Auflage. Verlag Europa-Lehrmittel, 2021, ISBN 978-3-8085-5870-6.
- Jan Lunze: Regelungstechnik 1. 6. Auflage. Springer Verlag, Berlin 2007, ISBN 978-3-540-70790-5. Regelungstechnik 2. 4. Auflage. Springer Verlag, Berlin 2006, ISBN 978-3-540-32335-8.
- Michael Laible: Mechanische Größen, elektrisch gemessen. Grundlagen und Beispiele zur technischen Ausführung. 7. Auflage. Expert Verlag, Renningen 1980, ISBN 3-8167-2892-8.
- Wolfgang Schneider: Praktische Regelungstechnik. Ein Lehr- und Übungsbuch für Nicht-Elektrotechniker. 3. Auflage. Vieweg+Teubner Verlag, Wiesbaden 2008, ISBN 978-3-528-24662-4.
- Walter Kaspers, Hans-Jürgen Küfner: Messen Steuern Regeln. 3. Auflage. Friedrich Vieweg & Sohn Verlag, Wiesbaden 1984, ISBN 3-528-24062-8.
- David Halliday, Robert Resnick, Jearl Walker: Physik. Bachelor-Edition, 2. Auflage. John Wiley & Sons Verlag, Weinheim 2013, ISBN 978-3-527-41181-8.