Staude-Drehung
Die Staude-Drehungen[1] nach Otto Staude sind in der Kreiseltheorie gleichförmige Drehungen eines schweren unsymmetrischen Kreisels um eine lotrechte, körperfeste aber frei drehbare Achse. An die Hauptträgheitsmomente und die Lage des Schwerpunkts werden keinerlei Bedingungen gestellt. Gleichförmige Drehungen sind unter diesen Umständen nur mit bestimmter Drehgeschwindigkeit um Drehachsen möglich, die auf einem körperfesten Ellipsenkegel liegen, dem Staude-Kegel.[2], der wesentlich auch von der Lage des Schwerpunkts abhängt und den Staude selbst Schwerpunktskegel nannte[3]
Die Drehung des unsymmetrischen Kreisels um eine lotrechte Hauptachse hat eine gewisse technische Bedeutung.[4] Staude entdeckte diese analytische Lösung der Euler’schen Kreiselgleichungen 1894.[5]
Allgemeines
Die Kreiselgleichungen können im allgemeinen Fall des unsymmetrischen schweren Kreisels nicht analytisch gelöst werden. Die drei bei beliebigen Anfangsbedingungen analytisch immer lösbaren Fälle, der Euler-Kreisel, der Lagrange-Kreisel und der Kowalewskaja-Kreisel stellen je drei Bedingungen an die Massenverteilung im Kreisel. Bei den Staude-Drehungen werden vier Forderungen ausschließlich an die Anfangsbedingungen gestellt.[6]
Edward Routh bewies 1892, dass die Schwerkraft eine gleichförmige Präzession des unsymmetrischen Kreisels, bei der eine Hauptachse OC einen geraden Kegel um die Vertikale beschreibt, nur dann zu unterhalten vermag, wenn der Kreisel um eine lotrechte körperfeste Achse rotiert[7]. Denn das Drehmoment der Zentrifugalkräfte, kurz das Zentrifugalmoment im rotierenden Kreisel schwankt mit der doppelten Frequenz der Eigendrehung des Kreisels um OC, wohingegen das Schweremoment der Gewichtskraft unabhängig von der Lage des Schwerpunkts höchstens mit der einfachen Frequenz der Eigendrehung pulsiert. Daher kann keine gleichförmige Eigendrehung um OC stattfinden. Routh folgerte weiter, dass die Drehachse vertikal und körperfest sein muss.
Das Zentrifugalmoment ist bei einer gleichmäßigen Drehung um eine raumfeste Drehachse senkrecht auf dieser Achse. Das Schweremoment ist immer senkrecht zur Vertikalachse und im dynamischen Gleichgewicht mit dem Zentrifugalmoment, weswegen eine raumfeste Drehachse bei einer gleichmäßigen Drehung lotrecht sein muss.[8]
Bei einer Drehung um eine lotrechte körperfeste Achse ist die Winkelgeschwindigkeit parallel zu dieser und weil im körperfesten System der Trägheitstensor konstant ist, ist dort auch der Drehimpuls fixiert. Die bei dessen Rotation um die senkrechte Achse entstehende Kreiselwirkung ist im dynamischen Gleichgewicht mit dem Schweremoment, weswegen die Winkelgeschwindigkeit, der Drehimpuls und die Schwerpunktsachse vom Bezugspunkt zum Schwerpunkt komplanar sind. Alle Winkelgeschwindigkeiten, für die das zutrifft, formen den Schwerpunktskegel. Es zeigt sich,[9] dass der Schwerpunkt, der auf keiner Hauptachse liegt, sich nur im Stillstand an höchster oder niedrigster Stelle – also auf der Drehachse – befinden kann. Außerdem sind die Hauptachsen die einzigen Mantellinien des Schwerpunktkegels, die keine permanenten Drehachsen sind, es sei denn, sie tragen den Schwerpunkt. Dann allerdings kann der Kreisel mit jeder Drehgeschwindigkeit um diese Achse umlaufen.
Die Griolische Präzession ist nach M. P. Guljaew die einzig dynamisch mögliche Präzession des unsymmetrischen Kreisels mit Eigendrehung. Bei jener Präzession ist weder die Präzessionsachse lotrecht noch die Winkelgeschwindigkeit raumfest.[10] E. I. Harlamowa konstruierte 1959 eine Lösung der Kreiselgleichungen, die die einzige dynamisch mögliche Präzession eines unsymmetrischen Körpers um eine vertikale Achse darstellt. Die Winkelgeschwindigkeit ist auch hier nicht konstant und die Hauptträgheitsmomente müssen die Bedingung C > 2A > 2B einhalten, weswegen die Lösung keinen starren Körper beschreibt, denn bei denen ist A + B > C. M. P. Guljaew bemerkte, dass ein starrer Körper mit Hohlräumen, die mit einer inkompressiblen idealen Flüssigkeit gefüllt sind, die Bedingung einhalten kann.[11]
Bedingungsgleichung für die permanenten Vertikalachsen
Der Staude-Kreisel rotiert mit gleichförmiger Winkelgeschwindigkeit Ω um eine lotrechte, also raumfeste, und gleichzeitig körperfeste Achse

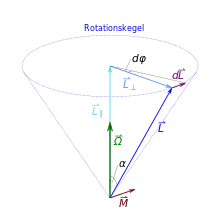
wo n1,2,3 die konstanten Koordinaten des körperfesten Einheitsvektors im Hauptachsensystem sind, lotrecht nach oben weist und ε = ±1 die Orientierung der körperfesten Achse anzeigt. Die Winkelgeschwindigkeit und der Drehimpuls sind ebenso körperfest. Darin ist Θ der Trägheitstensor des Kreisels bezüglich des Stützpunkts. Wegen der raumfesten Drehachse beschreibt der Drehimpuls um die Lotrichtung einen raumfesten Kegel, siehe Abb. 1. Die Drehimpulsänderung verursacht eine Kreiselwirkung , die sich in diesem Fall angeben lässt:







Das ist analog zu , wo sich die Geschwindigkeit bei einer reinen Rotation mit Winkelgeschwindigkeit aus dem Kreuzprodukt × mit dem Abstand zu einem Fixpunkt auf der Drehachse ergibt. Nach dem Drallsatz entspricht diese Drehimpulsänderung dem angreifenden Drehmoment, das hier vom Schweremoment





gestellt wird. Darin ist der Schwerpunkt, m die Masse, die Schwerebeschleunigung und g ihr Betrag. Kreiselwirkung und Moment befinden sich im dynamischen Gleichgewicht () mit der Konsequenz, dass der Schwerpunkt, die Drehgeschwindigkeit und der Drehimpuls in einer Ebene liegen:




Wenn unter Einhaltung dieser Bedingung der Kreisel mit der Winkelgeschwindigkeit Ω um die vertikale körperfeste Achse kreist, dann verharrt er in dem so hergestellten Bewegungszustand.[12] Die Komponenten obiger Vektorgleichung im Hauptachsensystem können beim unsymmetrischen Kreisel, wenn keine der drei n1,2,3 verschwindet, nach Ω aufgelöst werden:

Hierin sind
- s1,2,3 die Koordinaten des Schwerpunkts,
- n1,2,3 die Koordinaten der Lotrichtung und
- A, B, C die drei Hauptträgheitsmomente
im körperfesten Hauptachsensystem. Von den beiden möglichen Werten für das Vorzeichen ε ist nur dasjenige gültig, das auf nicht negatives Ω² führt, siehe auch den Abschnitt #Eigenschaften des Schwerpunktskegels. Das Vorzeichen von Ω, also der Drehsinn, bleibt beliebig. Die Winkelgeschwindigkeiten in Richtung der Hauptachsen ergeben sich aus dem Skalarprodukt der Winkelgeschwindigkeit ε Ω êz mit den Hauptachsen ê1,2,3 zu
- ω1,2,3 = Ω n1,2,3.
Staudes Schwerpunktsebene und -kegel
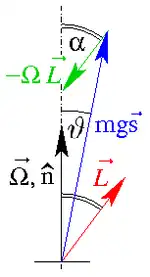
Die Lotrichtung, die Winkelgeschwindigkeit, der Schwerpunkt und der Drehimpuls befinden sich in einer Ebene, der Staude’schen Schwerpunktsebene, siehe Abb. 2. Folgende Spezialfälle können hier auftreten:
- Die Vertikale ist Hauptachse. Wenn der Schwerpunkt auch auf der Hauptachse liegt, dann sind Rotationen mit beliebiger Winkelgeschwindigkeit möglich. Andernfalls geht Ω gegen unendlich, denn die Dreiecksseiten in den Richtungen der Drehgeschwindigkeit und des Drehimpulses sind dann parallel. Weil das Kreiselmoment der Fliehkräfte um die Hauptachsen verschwindet, kann eine Kompensation des Schweremoments bei endlichen Drehgeschwindigkeiten nicht stattfinden.[13]
- Der Schwerpunkt liegt auf der Vertikalen, die keine Hauptachse ist. Dann ist Ω = 0.
Skalare Multiplikation obiger Gleichung mit oder ergibt das Spatprodukt[14]



oder in Komponenten im Hauptachsensystem

Bei festem n1,2,3 und variablem s1,2,3 definiert diese Gleichung eine Ebene, die Schwerpunktsebene. Ist umgekehrt der Schwerpunkt mit Komponenten s1,2,3 gegeben und die n1,2,3 frei, dann stellt die Gleichung einen Ellipsenkegel, den Staude’schen Schwerpunktskegel vor. Der Schwerpunktskegel besteht aus den Winkelgeschwindigkeiten , die mit dem zugehörigen Drehimpuls eine Ebene aufspannen, die den Schwerpunkt enthält,[15]. Beim symmetrischen Kreisel, wo zwei der drei Hauptträgheitsmomente übereinstimmen, entartet der Kegel in zwei zueinander senkrechte Ebenen[16] siehe den Abschnitt #Symmetrische Kreisel unten.

Eigenschaften des Schwerpunktskegels
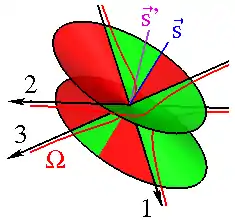
Die in den Koordinaten der Lotrichtung quadratische Gleichung definiert beim unsymmetrischen Kreisel, dessen Schwerpunkt auf keiner Hauptachse liegt, einen Ellipsenkegel, der aus zwei Halbkegeln besteht, die an ihrer Spitze verbunden sind, siehe Abb. 3. Ein Ellipsenkegel ist durch fünf Mantellinien eindeutig bestimmt,[18] die sich hier angeben lassen. Alle drei Hauptachsen des Kreisels sind Mantellinien (schwarz), denn dann sind zwei der Koordinaten n1,2,3 gleich null. Der Schwerpunkt (blau) und (lila) liegen ebenfalls auf Mantellinien. Der Staude’sche Schwerpunktskegel kann konstruiert werden, sobald die Massenverteilung des Kreisels bekannt ist.

Nach Abb. 2 ist das Schweremoment in z-Richtung gleich m g s sinϑ, wenn s der Abstand des Schwerpunkts vom Stützpunkt und ϑ der Neigungswinkel zwischen und der Vertikalen ist. Die Kreiselwirkung des Drehimpulses ist andererseits gleich Ω L sinα, wobei α die Neigung des Drehimpulses gegenüber der Lotrichtung und L der Betrag des Drehimpulses ist, der linear mit der Drehgeschwindigkeit zunimmt: L = J Ω mit J > 0. Schweremoment und Kreiselwirkung sind gleich groß:[19]
- m g s sinϑ = J Ω² sinα
Von den beiden Halbstrahlen mit Winkeln α und π + α in Radiant ist nur einer zulässig, je nach Vorzeichen von sinϑ. Wenn nun die Rotationsachse den Staude-Kegel entlang fährt, dann wechselt sinϑ das Vorzeichen, wenn die Rotationsachse die Schwerpunktachse passiert, und sinα, wenn eine Hauptachse erreicht wird. Die beiden Halbkegel werden durch die Schwerpunktachse und die drei Hauptachsen in jeweils vier Bereiche geteilt, die abwechselnd den zulässigen und den unzulässigen Halbstrahl der Drehachse enthalten. In Abb. 3 sind die Sektoren mit den zulässigen Halbstrahlen grün und die mit den unzulässigen rot gefärbt. In den zulässigen Sektoren der Halbkegel liegen rot gezeichnete Kurven und der Abstand eines ihrer Punkte P zur Kegelspitze Q ist proportional zur möglichen Winkelgeschwindigkeit Ω bei Drehung um PQ. Auf den Hauptachsen mit α = 0 wächst Ω über alle Grenzen, falls sinϑ ≠ 0. Auf der Mantellinie, die den Schwerpunkt enthält, ist sinϑ = 0 und Ω = 0, falls sinα ≠ 0. Mehr zum Schwerpunktskegel, insbesondere seine Entartungen, findet sich in der Originalarbeit.[5]
Stabilität der Staude-Drehungen
Die Staude-Drehungen können stabil oder instabil sein. Die Untersuchung der Stabilität erfordert viele Fallunterscheidungen.[20] und hat sich zunächst als Aufgabe mit fast hoffnungsloser Schwierigkeit herausgestellt. Die Lösung lässt sich aber vollständig angeben[21]
Es zeigt sich, dass ein Körper, der als kräftefreier Kreisel stabil rotiert, in bestimmten Drehzahlbereichen instabil werden kann, wenn er hängt, also statisch stabil ist. Umgekehrt kann ein Kreisel, der um seine Hauptachse mit dem mittelgroßen Trägheitsmoment kräftefrei stets instabil rotiert, bei bestimmten Drehzahlen unter Schwerkraftwirkung auch dann stabil werden, wenn er aufrecht, also statisch instabil ist. Das lässt sich auch experimentell bestätigen.[22] Beim unsymmetrischen Kreisel, der um eine Hauptachse kreist, darf deren Hauptträgheitsmoment nicht größer als doppelt so groß wie die anderen beiden Hauptträgheitsmomente sein, sonst ist die Drehung instabil[23]
Spezialfälle
Besondere Schwerpunktslagen
- Liegt der Schwerpunkt in einer Hauptebene, also einer von zwei Hauptachsen erzeugten Ebene, dann zerfällt der Schwerpunktskegel in zwei Ebenen, nämlich in eben diese Ebene und eine durch die zu ihr senkrechte Hauptachse.
- Liegt der Schwerpunkt auf einer Hauptachse, dann zerfällt der Kegel in die beiden Hauptebenen, die sich in dieser Hauptachse schneiden.[24]
Die Verhältnisse bei symmetrischen oder kräftefreien Kreiseln behandeln die folgenden Abschnitte.
Symmetrische Kreisel
Bei symmetrischen Kreiseln entartet der Schwerpunktskegel. Wenn der Schwerpunkt auf der Figurenachse des Kreisels liegt, handelt es sich um einen Lagrange-Kreisel ohne Eigendrehung und der Schwerpunktskegel ist nicht mehr definiert. Der Kreisel, der nunmehr ein Sphärisches Pendel ist, kann um jedwede Achse regulär präzedieren.
Im allgemeineren Fall, wo der Schwerpunkt nicht auf der Figurenachse des Kreisels liegt, entartet der Schwerpunktskegel in zwei zueinander senkrechte Ebenen: in die zur Figurenachse senkrechte, äquatoriale Ebene und die Schwerpunktsebene, die den Schwerpunkt und die Figurenachse enthält.[25] Die äquatoriale Ebene scheidet jedoch wieder aus, da sie aus lauter Hauptachsen besteht, die den Schwerpunkt nicht tragen. Der Schwerpunktskegel verkümmert also zur Ebene, die den Schwerpunkt und die Figurenachse entält.[24]
Weil die Hauptachsen in der äquatorialen Ebene beliebig orientiert sind, kann die 1-Achse so gelegt werden, dass sich der Schwerpunkt im Abstand s1 > 0 von der Figurenachse auf ihr befindet.
Die #Bedingungsgleichung für die permanenten Vertikalachsen führt mit den äquatorialen Hauptträgheitsmomenten A = B im Hauptachsensystem des Kreisels auf drei Gleichungen

- ê1: A [ ε κ c3 + Ω² ( 1 – κ ) n3 ] n2 = 0
- ê2: A [ ε κ ( c1 n3 – c3 n1 ) + Ω² ( κ – 1 ) n1 n3 ] = 0
- ê3: -ε m g s1 n2 = 0
Darin bedeuten
- κ = C⁄A das Verhältnis vom axialen zum äquatorialen Hauptträgheitsmoment und
- c1,3 = m g s1,3/C sind Konstanten mit der Dimension T –2.
Aus der dritten Gleichung folgt sofort n2 = 0, was dann auch die erste Identität befriedigt. Die Winkelgeschwindigkeit um die z-Achse berechnet sich aus der zweiten Gleichung:

Das Vorzeichen ε ist so zu wählen, dass der Radikand unter der Wurzel nicht negativ wird. Bei den Karussell-Bewegungen des Kowalewskaja-Kreisels wie in Abb. 4 ist κ = ½ und c3 = 0.
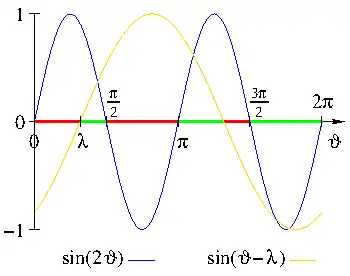
Bei Benutzung der Euler-Winkel ψ, ϑ und φ, siehe Euler-Winkel in der Kreiseltheorie, lässt sich n2 = 0 mit cos(φ) = 0 und η := sin(φ) = ±1 erfüllen. Die Schwereachse vom Bezugspunkt zum Schwerpunkt im Abstand s schließt den Winkel λ mit der 3-Achse ein: s3 = η s cos(λ) und s1 = η s sin(λ). Dann ergibt sich:[26]

Beim abgeplatteten Kreisel (C > A) ist der Radikand in den Bereichen
- λ < ϑ < π⁄2, π < ϑ < λ + π oder 3π⁄2 < ϑ < 2π
positiv. In Abb. 5 sind diese zulässigen Bereiche auf der Abszisse grün markiert. Beim gestreckten Kreisel wechselt C - A das Vorzeichen und nur die komplementären, rot markierten Bereiche sind zulässig.
Kräftefreier Kreisel
Beim kräftefreien Euler-Kreisel ist g s1,2,3 = 0 und der Schwerpunktskegel ist bedeutungslos. Die #Bedingungsgleichung für die permanenten Vertikalachsen reduziert sich auf

was erfüllt ist, wenn der Kreisel stillsteht oder um eine seiner Hauptachsen rotiert, siehe Trägheitsellipsoid.
Beispiel
Der Schwerpunktskegel aus Abb. 3 lässt sich mit den Daten aus der Tabelle
| A | B | C | s1 | s2 | s3 |
|---|---|---|---|---|---|
| 8 | 11 | 16 | -6 | -1 | -8 |
im Hauptachsensystem wie folgt konstruieren.
Die Kegelgleichung wird mittels einer symmetrischen Matrix M ausgedrückt:

mit

Die Hauptachsentransformation dieser Matrix gelingt mit deren charakteristischem Polynom

worin E die Einheitsmatrix ist und det die Determinante ausgibt. Das Polynom hat die reellen Nullstellen

Darin ist cos der Cosinus und arccos seine Umkehrfunktion. Die Eigenwerte λ1,2,3 werden so sortiert, dass die ersten beiden gleiches Vorzeichen besitzen. Zu den Eigenwerten berechnen sich die auf Länge eins normierten Eigenvektoren

Wenn diese kein Rechtssystem bilden, werden die ersten beiden Eigenwerte und -vektoren vertauscht. Mit den Werten aus der Tabelle entsteht auf vier signifikante Stellen gerundet:

Jeder Punkt auf dem Staude-Kegel wird durch einen Vektor

erreicht, worin die Koordinaten x, y, z der Quadrik

gehorchen. Eine Ellipse als Schnitt dieses Ellipsenkegels entsteht bei konstantem z.
Fußnoten
- Grammel (1920), S. 132, Grammel (1950), S. 172, Magnus (1971), S. 132, Klein und Sommerfeld (2010), S. 386.
- Grammel (1920), S. 132, Magnus (1971), S. 134.
- Staude (1894), S. 321.
- Magnus (1971), S. 136.
- Otto Staude: Über permanente Rotationsachsen bei der Bewegung eines schweren Körpers um einen festen Punkt. siehe Literatur.
- Klein und Sommerfeld (2010), S. 378 und S. 581.
- Edward Routh: Die Dynamik der Systeme starrer Körper. Die Höhere Dynamik. Band 2. B.G. Teubner, Leipzig 1898, S. 163 (archive.org – Der Satz erschien bereits 1892 in der 5. Auflage von The advanced part of A treatise on the dynamics of a system of rigid bodies von Routh, S. 142f.).
- Grammel (1920), S. 130, Grammel (1950), S. 171f.
- Grammel (1950), S. 171 ff.
- Magnus (1971), S. 143.
- Leimanis (1965), S. 116.
- Staude (1894), S. 321.
- Magnus (1971), S. 136.
- Grammel (1920), S. 132.
- Staude (1894), S. 322.
- Magnus (1971), S. 134.
- A : B : C = 8 : 11 : 16, s1 : s2 : s3 = -6 : -1 : -8
- Klein und Sommerfeld (2010), S. 388.
- Klein und Sommerfeld (2010), S. 389. Die Ausgangsposition wurde wie in Abb. 2 so gewählt, dass zunächst ε = +1 ist.
- Magnus (1971), S. 136, Grammel (1950), S. 178ff. und Leimanis (1965)
- Grammel (1950), S. 178f.
- Magnus (1971), S. 139.
- Magnus (1971), S. 141. Genaueres findet sich bei Grammel (1950), S. 191 ff.
- Grammel (1950), S. 177 f.
- Magnus (1971), S. 134.
- Magnus (1970), S. 135f. Dort ist ψ = λ, φ = ϑ und Magnus verwechselt auf S. 136 den gestreckten Kreisel mit A > C mit dem abgeplatteten Kreisel mit A < C.
Literatur
- Otto Staude: Über permanente Rotationsachsen bei der Bewegung eines schweren Körpers um einen festen Punkt. In: Journal für die reine und angewandte Mathematik. Band 114, 1894, S. 318–334 (digizeitschriften.de [abgerufen am 14. April 2018]).
- K. Magnus: Kreisel: Theorie und Anwendungen. Springer, 1971, ISBN 978-3-642-52163-8, S. 132 ff. (eingeschränkte Vorschau in der Google-Buchsuche [abgerufen am 20. Februar 2018]).
- R. Grammel: Der Kreisel. Seine Theorie und seine Anwendungen. Vieweg Verlag, Braunschweig 1920, DNB 451641280, S. 130 ff. (archive.org – „Schwung“ bedeutet Drehimpuls, „Drehstoß“ Drehmoment und „Drehwucht“ Rotationsenergie).
oder
R. Grammel: Der Kreisel. Seine Theorie und seine Anwendungen. 2. überarb. Auflage. Band 1. Springer, Berlin, Göttingen, Heidelberg 1950, S. 171 ff. - F. Klein, A. Sommerfeld: The Theory of the Top. Development of the Theory in the Case of the Heavy Symmetric Top. Volume II. Birkhäuser, Boston 2010, ISBN 978-0-8176-4824-4, S. 386 ff., doi:10.1007/978-0-8176-4827-5 (englisch, Formelzeichen werden auf S. 197ff. insbesondere S. 200 erklärt.).
- Eugene Leimanis: The General Problem of the Motion of Coupled Rigid Bodies about a Fixed Point. Springer Verlag, Berlin, Heidelberg 1965, ISBN 978-3-642-88414-6, S. 67, doi:10.1007/978-3-642-88412-2 (englisch, eingeschränkte Vorschau in der Google-Buchsuche [abgerufen am 21. März 2018]).