Rastpolbahn
Die Rastpolbahn (englisch fixed Centrode) ist die Gesamtheit aller Raumpunkte im raumfesten Bezugssystem, die bei einer Starrkörperbewegung jemals Momentanpol sind. Der Momentanpol ist der bei einer Starrkörperbewegung stillstehende Punkt. Ein solcher existiert nur bei ebenen, nicht rein translatorischen Bewegungen und daher ist die Rastpolbahn eine ebene Kurve, siehe Bild.

Rot: Geschwindigkeitsvektoren;
Gelber Punkt: Momentanpol;
Blau: Rastpolbahn des mittleren Stabes;
Grün: Gangpolbahn des mittleren Stabes
Für die Rastpolbahn gilt bei einer Bewegung in der x-y-Ebene und Drehung um die z-Achse:


Der Index „M“ verweist auf den Momentanpol, „A“ auf einen beliebigen Punkt im Körper, (x, y) sind die Koordinaten in der Ebene, (vx, vy) die Geschwindigkeiten in x- bzw. y-Richtung und ω ist die Winkelgeschwindigkeit um die z-Achse. Wenn ω=0 ist, dann liegt eine Translation vor und der Momentanpol sowie der ihm zugeordnete Punkt auf der Rastpolbahn sind nicht definiert.
Die Rastpolbahn ist in der Kinematik von Fahrzeugen, Getriebetechnik, Robotik und auch Prothetik interessant.
Rastpolbahn in drei Dimensionen
Gegeben sei ein kartesisches Koordinatensystem mit zueinander senkrechten x-, y- und z-Richtungen und zugehöriger Standardbasis . Die Translation des Starrkörpers erfolge parallel zur x-y-Ebene und die Drehung um die z-Achse. Die Translation wird mit einem zeitabhängigen Bezugspunkt vorgegeben, für den sich jeder bewegte (oder auch ruhende) Punkt und auch der Schwerpunkt des Starrkörpers eignet. Die Rotation erfolgt um die z-Achse mit der Drehgeschwindigkeit ω. Die Geschwindigkeit eines an einem Ort befindlichen Partikels ist bei einer Starrkörperbewegung mit




gegeben. Das Rechenzeichen „ד bildet das Kreuzprodukt und ist die Geschwindigkeit des Bezugspunkts. Der Momentanpol ist nun ein Raumpunkt , um den sich das Geschwindigkeitsfeld momentan als reine Drehung darstellt:



Mit diesem Punkt sind auch alle Punkte auf der Geraden Momentanpole, weshalb die z-Komponente des Momentanpols unbestimmt ist. Sei der Momentanpol, der dieselbe z-Komponente hat wie der Bezugspunkt: . Wenn die Drehgeschwindigkeit verschwindet, dann ist die Geschwindigkeit wegen nicht vom Ort abhängig und daher gleichförmig. Die Definitionsgleichung





enthält dann gar keine Definition mehr und der Momentanpol ist mithin nicht definiert. Im Folgenden wird vorausgesetzt.

Das Kreuzprodukt der Drehachse mit der Geschwindigkeit ergibt:
![{\displaystyle {\vec {e}}_{z}\times {\vec {v}}({\vec {m}},t)={\vec {e}}_{z}\times {\dot {\vec {s}}}(t)+{\vec {e}}_{z}\times [\omega (t){\vec {e}}_{z}\times ({\vec {m}}(t)-{\vec {s}}(t))]={\vec {e}}_{z}\times {\dot {\vec {s}}}(t)-\omega (t)({\vec {m}}(t)-{\vec {s}}(t))={\vec {0}}}](../I/4a1898bac17a592c095a11cc02f70b592b9d1624.svg)
Weil die Drehgeschwindigkeit nicht null ist, kann nach dem Momentanpol aufgelöst werden:

Die linke Formel präsentiert die mit der Zeit t parametrisierte Rastpolbahn. Die Vektoren bilden – wie die rechte Formel zeigt – ein orthogonales Rechtssystem. Es bestätigt sich, dass der Momentanpol nur von den Parametern der Bewegung und nicht von den Raumkoordinaten abhängt und somit selbst ein ortsunabhängiger Bewegungsparameter ist. Weil jeder beliebige Punkt als Bezugspunkt gewählt werden kann, gilt diese Formel allgemein, was sich durch Einsetzen von verifiziert:




Diese Formel enthält statt des Bezugspunktes und seiner Geschwindigkeit einen beliebigen Raumpunkt und die in ihm vorliegende Geschwindigkeit. Die x-y-Komponenten dieser Gleichung wurden eingangs angegeben. Für jeden Raumpunkt bilden die Drehachse , der Abstandsvektor zum Momentanpol und die Geschwindigkeit ein orthogonales Rechtssystem.



Rastpolbahn in der komplexen Zahlenebene
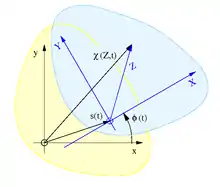
Der Momentanpol und die Rastpolbahn sind nur bei ebenen Bewegungen definiert und daher kann die ebene Starrkörperbewegung als Bewegung der komplexen Zahlenebene modelliert werden. Der feststehende Bildraum ist die Rastebene, die den Raum unserer Anschauung repräsentiert und die das Rastkoordinatensystem und die Rastpolbahn enthält. Der bewegte Urbildraum ist die Gangebene, die den in ihr ruhenden Starrkörper und das Gangkoordinatensystem beinhaltet. Alle Partikel des Starrkörpers bewegen sich synchron mit der Gangebene mit. In Anlehnung an die räumliche eulersche und die materielle lagrangesche Betrachtungsweise werden die Koordinaten in der Rastebene als räumlich sowie mit Kleinbuchstaben und die Koordinaten in der Gangebene als materiell sowie mit Großbuchstaben bezeichnet, siehe Bild.
Jeder Punkt in der komplexen Zahlenebene entspricht einer komplexen Zahl. Die Translation dieses Punktes wird als Addition einer anderen Zahl und die Rotation um den Ursprung als Produkt mit der komplexen Zahl modelliert, mit dem Drehwinkel , der eulerschen Zahl e und der imaginären Einheit i.


Die Bewegungsfunktion χ(Z,t) und das materielle Geschwindigkeitsfeld von materiellen Punkten Z kann dann als


geschrieben werden. Der Punkt s(t) bezeichnet einen sich bewegenden Bezugspunkt, in dem der Ursprung des Gangkoordinatensystems liegt, und die Drehgeschwindigkeit ω ergibt sich aus der Zeitableitung des Drehwinkels: . Ersatz des materiellen Punktes durch sein räumliches Bild z liefert das räumliche Geschwindigkeitsfeld in der Rastebene



Im Momentanpol m(t) verschwindet diese Geschwindigkeit:

In der Bestimmungsgleichung für den Momentanpol m(t) lässt sich einsetzen mit dem Resultat:


Die linke Formel bezeichnet die Rastpolbahn in der Rastebene, deren Real- und Imaginärteil eingangs angegeben ist. Die rechte Formel zeigt: Die Geschwindigkeit eines Partikels ist das ω-Fache der um 90° gegen den Uhrzeigersinn gedrehten Strecke vom Momentanpol zum Partikel.
Beispiel
Die Rastpolbahn des rechts im Bild gegebenen Systems soll berechnet werden. Der Kreuzschieber habe die Länge 2r und sein Mittelpunkt bewege sich mit der Winkelgeschwindigkeit Ω auf der Kreisbahn mit dem Radius R um den Ursprung. Dann ist der Mittelpunkt des Kreuzschiebers geben durch:


Der Kreuzschieber dreht sich mit entgegengesetzt gleich großer Winkelgeschwindigkeit ω=−Ω um seinen Mittelpunkt. Für einen Punkt auf dem Kreuzschieber im Abstand r vom Mittelpunkt resultiert die Position:

Ableitung nach der Zeit liefert die Geschwindigkeit:

Die eingangs angegebenen Formeln liefern die Rastpolbahn:

Unabhängig von der Länge des Kreuzschiebers ist der Kreis mit dem doppelten Radius der Kreisbahn des Bezugspunktes die Rastpolbahn. Im Bild oben ist der Kreuzschieber fett Schwarz gezeichnet und hat die Länge r=R.
In der komplexen Zahlenebene lautet der Bezugspunkt und der um den Bezugspunkt laufende Punkt auf dem Kreuzschieber wird als mit der gegenläufigen Winkelgeschwindigkeit ω=−Ω umlaufendes Partikel Z modelliert:


denn das Partikel Z soll in der Gangebene ruhen. Aus diesem räumlichen Geschwindigkeitsfeld berechnet sich der Momentanpol:

Die Formel für die Rastpolbahn liefert das gleiche Ergebnis:

Auch hier ergibt sich eine Kreisbahn mit doppelt so großem Radius wie die Kreisbahn des Bezugspunktes als Rastpolbahn.
Siehe auch
Literatur
- M. Husty: Kinematik und Robotik. Springer, 2012, ISBN 978-3-642-63822-0.
- K. Luck, K.-H. Modler: Getriebetechnik. Analyse Synthese Optimierung. Springer, 1990, ISBN 978-3-211-82147-3.
- G. Bär: Ebene Kinematik. Script zur Vorlesung. Institut für Geometrie, TU Dresden (tu-dresden.de [PDF; abgerufen am 1. April 2015] Enthält weitere Literaturempfehlungen).