Orthogonalität
Der Begriff Orthogonalität wird innerhalb der Mathematik in unterschiedlichen, aber verwandten Bedeutungen verwendet.
![[AB]](../I/13e80b9404482bdbe7fe18d8435b3dd42fd39bb0.svg)
![{\displaystyle [CD]}](../I/cc0573d2a8fc2386767a2b81c2a5777e9271ae59.svg)
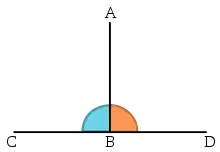
In der Elementargeometrie nennt man zwei Geraden oder Ebenen orthogonal (bzw. senkrecht), wenn sie einen rechten Winkel, also einen Winkel von 90°, einschließen.
In der linearen Algebra wird der Begriff auf allgemeinere Vektorräume erweitert: zwei Vektoren heißen zueinander orthogonal, wenn ihr Skalarprodukt null ist.
Diese Bedeutung wird auch auf Abbildungen zwischen Vektorräumen übertragen, die das Skalarprodukt und damit die Orthogonalität zweier Vektoren unverändert lassen.
Bezeichnungen
Der Begriff orthogonal (griechisch ὀρθός orthos „gerade, aufrecht, richtig“ und γωνία gonia „Ecke, Winkel“) bedeutet „rechtwinklig“. Gleichbedeutend zu rechtwinklig steht auch normal (lateinisch norma „Maß“, im Sinne des rechten Winkels). Das Wort „normal“ wird in der Mathematik aber auch mit anderen Bedeutungen verwendet. Senkrecht kommt vom Senkblei (Lot) und bedeutet ursprünglich nur orthogonal zur Erdoberfläche (lotrecht). Dieser Sachverhalt wird auch durch vertikal (lat. vertex „Scheitel“) ausgedrückt.
Man bezeichnet zwei Geraden, Ebenen oder Vektoren und , die orthogonal bzw. nicht orthogonal zueinander sind, mit


- bzw. .


Basierend auf der englischen Bezeichnung perpendicular wird das Orthogonalitätssymbol in HTML mit ⊥ und in LaTeX (innerhalb der Mathematik-Umgebung) mit \perp kodiert. Im Zeichenkodierungsstandard Unicode besitzt das Symbol ⊥ die Position U+22A5.
Orthogonalität in der Geometrie
Elementargeometrie
In der Elementargeometrie heißen zwei Geraden oder Ebenen orthogonal, wenn sie einen rechten Winkel, d. h. einen Winkel von 90° einschließen. Dabei sind folgende Bezeichnungen gebräuchlich:
- Eine Gerade heißt Orthogonale (Normale) auf eine Ebene, wenn ihr Richtungsvektor ein Normalenvektor der Ebene ist.
- Eine Ebene heißt Orthogonale (Normalebene) einer Ebene, wenn ihr Normalenvektor in dieser Ebene liegt.
- Eine Gerade/Ebene heißt Orthogonale (Normale) an eine Kurve, wenn sie zur Tangente/Tangentialebene im Schnittpunkt orthogonal ist.
In einem orthogonalen Polygon (beispielsweise einem Rechteck) bilden je zwei benachbarte Seiten einen rechten Winkel, bei einem orthogonalen Polyeder (beispielsweise einem Quader) je zwei benachbarte Kanten und damit auch benachbarte Seitenflächen.
Vektoren
Den Winkel zweier Vektoren und im kartesischen Koordinatensystem kann man über das Skalarprodukt



berechnen. Dabei bezeichnen und jeweils die Längen der Vektoren und den Kosinus des von den beiden Vektoren eingeschlossenen Winkels. Bilden zwei Vektoren und einen rechten Winkel, dann gilt



- .

Zwei Vektoren sind somit zueinander orthogonal, wenn ihr Skalarprodukt gleich null ist. Der Nullvektor ist dabei zu allen Vektoren orthogonal.[1]
Eine Menge von Vektoren wird als paarweise orthogonal bezeichnet, wenn für alle gilt, dass und orthogonal zueinander sind.




Geraden und Ebenen
Zwei Geraden in der Ebene sind dann orthogonal, wenn ihre Richtungsvektoren orthogonal sind. Im Raum oder in höheren Dimensionen ist kein Schnittpunkt nötig. Zwei Geraden können auch dann orthogonal sein, wenn sie windschief zueinander sind. Eine Gerade und eine Ebene im Raum sind orthogonal, wenn der Richtungsvektor der Geraden orthogonal zu jedem Vektor in der Ebene ist.
Zwei Ebenen im euklidischen Raum sind orthogonal, wenn es eine Gerade gibt, die in einer der beiden Ebenen enthalten und orthogonal zur zweiten ist.
Sind zwei Geraden in der euklidischen Ebene durch die Gleichungen
- und


gegeben, so sind sie genau dann orthogonal, wenn ist, oder äquivalent: wenn gilt, denn genau dann sind mit



ihre Richtungsvektoren orthogonal.
Synthetische Geometrie
In der synthetischen Geometrie kann eine Orthogonalität durch die axiomatische Beschreibung einer Orthogonalitätsrelation zwischen Geraden auf gewissen affinen Inzidenzebenen eingeführt werden.
Orthogonalität in der linearen Algebra
Orthogonale und orthonormale Vektoren
In der linearen Algebra werden in einer Erweiterung des Begriffs euklidischer Raum auch mehrdimensionale Vektorräume über den reellen oder komplexen Zahlen einbezogen, für die ein Skalarprodukt definiert ist. Das Skalarprodukt zweier Vektoren und ist dabei eine Abbildung, die gewisse Axiome erfüllen muss und typischerweise in der Form geschrieben wird. Allgemein gelten dann zwei Vektoren und aus einem solchen Skalarproduktraum als orthogonal zueinander, wenn das Skalarprodukt der beiden Vektoren gleich null ist, das heißt, wenn




gilt. Beispielsweise sind im Raum die beiden Vektoren und orthogonal bezüglich des Standardskalarprodukts, da




ist. Eine Menge von Vektoren nennt man dann orthogonal oder Orthogonalsystem, wenn alle darin enthaltenen Vektoren paarweise orthogonal zueinander sind. Wenn zusätzlich alle darin enthaltenen Vektoren die Norm eins besitzen, nennt man die Menge orthonormal oder ein Orthonormalsystem. Eine Menge von orthogonalen Vektoren, die alle vom Nullvektor verschieden sind, ist immer linear unabhängig und bildet deshalb eine Basis der linearen Hülle dieser Menge. Eine Basis eines Vektorraums aus orthonormalen Vektoren wird dementsprechend Orthonormalbasis genannt. Für je zwei Vektoren einer Orthonormalbasis gilt dabei

- ,

wobei das Kronecker-Delta bezeichnet. Endlichdimensionale Skalarprodukträume und Hilberträume besitzen immer eine Orthonormalbasis. Bei endlichdimensionalen Vektorräumen und bei separablen Hilberträumen kann man eine solche mit Hilfe des Gram-Schmidtschen Orthonormalisierungsverfahren finden. Ein Beispiel für eine Orthonormalbasis ist die Standardbasis (oder kanonische Basis) des dreidimensionalen Raumes .



Orthogonale Funktionen
Der Begriff Vektorraum kann dahingehend verallgemeinert werden, dass auch gewisse Funktionenräume als Vektorräume behandelt werden können, und Funktionen werden dann als Vektoren angesehen. Zwei Funktionen und eines Skalarproduktraums heißen dann zueinander orthogonal, wenn



gilt. Zum Beispiel ist das L2-Skalarprodukt für stetige reellwertige Funktionen auf einem Intervall durch
![[a,b]](../I/9c4b788fc5c637e26ee98b45f89a5c08c85f7935.svg)

definiert. Bezüglich dieses Skalarprodukts sind beispielsweise auf dem Intervall die beiden Funktionen und zueinander orthogonal, denn es gilt
![[-1,1]](../I/51e3b7f14a6f70e614728c583409a0b9a8b9de01.svg)


- .

In vollständigen Skalarprodukträumen, sogenannten Hilberträumen, lassen sich so orthogonale Polynome und Orthogonalbasen bestimmen. Allerdings sind viele interessante Räume, wie etwa die L2-Räume, unendlichdimensional, siehe dazu Hilbertraumbasis. In der Quantenmechanik bilden auch die Zustände eines Systems einen Vektorraum und entsprechend spricht man dort auch von orthogonalen Zuständen.
Orthogonale Matrizen
Eine quadratische, reelle Matrix heißt orthogonale Matrix, wenn sie mit dem Skalarprodukt verträglich ist, das heißt wenn


für alle Vektoren gilt. Eine Matrix ist genau dann orthogonal, wenn ihre Spalten (oder ihre Zeilen), als Vektoren aufgefasst, zueinander orthonormal (nicht nur orthogonal) sind. Äquivalent dazu ist die Bedingung bzw. . Orthogonale Matrizen beschreiben Drehungen und Spiegelungen in der Ebene oder im Raum. Die Menge aller orthogonalen Matrizen der Größe bildet die orthogonale Gruppe . Die Entsprechung bei Matrizen mit komplexen Einträgen heißt unitäre Matrix.






Orthogonale Abbildungen
Sind und zwei reelle Skalarprodukträume, dann heißt eine Abbildung orthogonal, wenn




für alle Vektoren gilt. Eine orthogonale Abbildung erhält damit das Skalarprodukt zweier Vektoren und bildet so orthogonale Vektoren auf orthogonale Vektoren ab. Eine Abbildung zwischen endlichdimensionalen Skalarprodukträumen ist genau dann orthogonal, wenn ihre Matrixdarstellung bezüglich einer Orthonormalbasis eine orthogonale Matrix ist. Weiter ist eine orthogonale Abbildung eine Isometrie und erhält somit auch Längen und Abstände von Vektoren.

Orthogonale Abbildungen sind nicht zu verwechseln mit zueinander orthogonalen Abbildungen. Dabei handelt es sich um Abbildungen, die selbst als Vektoren aufgefasst werden und deren Skalarprodukt gleich null ist. Abbildungen zwischen komplexen Skalarprodukträumen, die das Skalarprodukt erhalten, werden als unitäre Abbildungen bezeichnet.
Orthogonale Projektionen
Ist ein endlichdimensionaler reeller oder komplexer Vektorraum mit einem Skalarprodukt, so gibt es zu jedem Untervektorraum die Projektion entlang des orthogonalen Komplements von , welche Orthogonalprojektion auf genannt wird. Sie ist die eindeutig bestimmte lineare Abbildung mit der Eigenschaft, dass für alle



- und
- für alle



gilt. Ist ein unendlichdimensionaler Hilbertraum, so gilt diese Aussage mit dem Projektionssatz entsprechend auch für abgeschlossene Untervektorräume . In diesem Fall kann stetig gewählt werden.

Orthogonalität in normierten Räumen
In einem Skalarproduktraum ist äquivalent zu für alle Skalare . Das motiviert folgende Definition[2]:


- Für aus einem normierten Raum sei für alle



Dieser Orthogonalitätsbegriff in normierten Räumen ist wesentlich schwächer als in Skalarprodukträumen. Im Allgemeinen ist Orthogonalität weder symmetrisch noch additiv, das heißt aus folgt im Allgemeinen nicht und aus und folgt im Allgemeinen nicht .





Dieser Umstand führt zu weiteren Begriffsbildungen, denn man wird sich für solche normierten Räume interessieren, in denen die Orthogonalität additiv ist. Es stellt sich heraus, dass das genau die glatten normierten Räume sind.
Orthogonale Koordinatensysteme
Bei orthogonalen Koordinatensystemen schneiden sich an jedem Punkt die Koordinatenlinien senkrecht, d. h. die Tangentenvektoren an diese Kurven stehen paarweise aufeinander senkrecht. Neben den kartesischen Koordinaten gibt es auch orthogonale krummlinige Koordinaten. Die wichtigsten Beispiele hierfür sind die Polarkoordinaten in der Ebene sowie die Zylinder- und Kugelkoordinaten im dreidimensionalen Raum. Im Gegensatz zu den kartesischen Koordinaten gibt es bei den krummlinigen Koordinaten keine globale Basis für den gesamten Raum, sondern lokale Basisvektoren an jedem einzelnen Punkt. Diese können als Tangentenvektoren zu den Koordinatenlinien berechnet werden: siehe Beispiel für Polarkoordinaten.
Anwendungen
Orthogonalität wird in vielen Anwendungen genutzt, weil dadurch Berechnungen einfacher oder robuster durchgeführt werden können. Beispiele sind:
- die Fourier-Transformation und die Wavelet-Transformation in der Signalverarbeitung
- QR-Zerlegungen von Matrizen zur Lösung von Eigenwertproblemen
- die Gauß-Quadratur zur numerischen Berechnung von Integralen
- orthogonale Felder in der statistischen Versuchsplanung
- orthogonale Codes, etwa der Walsh-Code, in der Kanalkodierung
- das Orthogonalverfahren zur Vermessung in der Geodäsie
Siehe auch
- Parallelität (Geometrie)
- Orthogonalitätsrelationen in der Gruppentheorie
Literatur
- Elemente der Mathematik. Lineare Algebra/Analytische Geometrie Leistungskurs. Schroedel Verlag GmbH, 2004, S. 64.
- W. Werner: Vektoren und Tensoren als universelle Sprache in Physik und Technik. Band 1. Springer Vieweg, ISBN 978-3-658-25271-7.
Weblinks
- Video: Skalarprodukt Teil 2, Orthogonalität. Jörn Loviscach 2011, zur Verfügung gestellt von der Technischen Informationsbibliothek (TIB), doi:10.5446/10213.
Einzelnachweise
- Harald Scheid, Wolfgang Schwarz: Elemente der Linearen Algebra und der Analysis, Spektrum Akademischer Verlag, ISBN 978-3-8274-1971-2, Kap. III.1 Definition 4
- Joseph Diestel: Geometry of Banach Spaces – Selected Topics, Lecture Notes in Mathematics 485, Springer-Verlag (1975), ISBN 3-540-07402-3, Definition auf Seite 24