Omnidirektionaler Antrieb
Ein omnidirektionaler Antrieb, englisch Omnidrive genannt, ist ein Antrieb mit einer speziellen Radkonstruktion, mit dem ein Fahrzeug jederzeit in eine beliebige Richtung fahren kann. Meistens wird dieser Antrieb in der Robotik verwendet und gehört bei Fußballrobotern seit Jahren zum Standard.[1]

Bauformen
Allseitenräder

Das Kernstück eines omnidirektionalen Antriebs ist ein sogenanntes Allseitenrad oder omnidirektionales Rad, aus dem Englischen auch Omniwheel genannt. Auf der Umlauffläche eines Hauptrades sind dabei weitere, meistens tonnenförmige Hilfsräder angebracht, deren Drehachsen im rechten Winkel zur Drehachse des Hauptrades liegen.
Wird das Hauptrad angetrieben, blockieren die Hilfsräder und dienen als Lauffläche des Hauptrades. Wird der Antrieb gestoppt und das Fahrzeug in eine andere Richtung bewegt, beispielsweise durch ein zweites, im rechten Winkel angebrachtes Omniwheel, drehen sich die Hilfsräder und minimieren somit den Reibungswiderstand des Rades.
Durch diese Art der Konstruktion wird eine schnelle Fortbewegung in nahezu jedem Winkel zur Laufrichtung des Hauptrades ermöglicht.
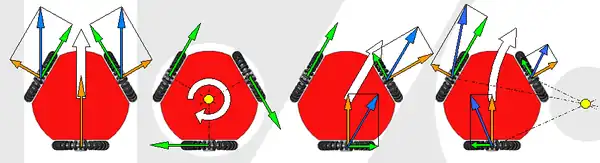
Geschwindigkeitsvektoren:
Roboter weiß; Antriebsgeschwindigkeit des Rades grün; Seitwärtsausgleich des Rades orange; Gesamtgeschwindigkeit des Rades blau; Drehpunkt (Momentanpol) gelb.
Nachteile des Allseitenrades sind der unruhige Lauf und die geringen Traglasten.
Mecanum-Räder
Das Mecanum-Rad ähnelt den Allseitenrädern. Diese sind prinzipiell als ballige Walzen ausgeführt und unter 45° zur Drehachse angeordnet. Durch die Schrägstellung der Hilfsräder ist es einfacher möglich, eine geschlossene Kontur der Lauffläche zu realisieren. Dies ermöglicht einen ähnlich ruhigen Lauf wie bei normalen Rädern. Allerdings haben kleinere Mecanum-Räder Probleme auf unebenem Untergrund und benötigen eine aufwändigere Lagerung, um die statische Überbestimmtheit zu umgehen. Mecanum-Räder werden entweder in kleineren Robotern für die Forschung oder zum Bewegen sehr großer Lasten eingesetzt.
 Mecanum-Rad
Mecanum-Rad Mobiler omnidirektionaler Roboter mit Mecanum-Rädern
Mobiler omnidirektionaler Roboter mit Mecanum-Rädern
Fahr-Dreh-Module
Ein Fahr-Dreh-Modul ist eine integrierte Baugruppe, die ein klassisches Antriebsrad enthält, das zusätzlich aktiv um seine Hochachse gedreht und ausgerichtet werden kann. Diese Lösung ist die technisch aufwändigste, besitzt aber auch klare Vorteile. Das einzelne große Antriebsrad kann auch auf unebenem oder schmutzigem Untergrund und sogar über kleinere Hindernisse (Kabel, Fugen) fahren, ohne dass es zu Schlupf und damit zu Odometrieproblemen kommt. Da alle Räder angetrieben und aktiv gelenkt werden, ist statische Überbestimmtheit in vielen Fällen unbedenklich und führt nicht zum Verlust der Kontrolle über das Fahrzeug. Ein Fahrzeug mit Fahr-Dreh-Modulen kann sich zwar omnidirektional aber nicht immer übergangslos bewegen, da vor dem Losfahren unter Umständen erst kurz die Räder ausgerichtet werden müssen.
Fahr-Dreh-Module werden vor allem in der Forschung an Servicerobotern wie zum Beispiel im Care-O-bot 3 und in der DESIRE-Technologieplattform eingesetzt.
 Kommerzielles Fahr-Dreh-Modul von Neobotix
Kommerzielles Fahr-Dreh-Modul von Neobotix NASAs Rover „K10“ mit vier Fahr-Dreh-Modulen.
NASAs Rover „K10“ mit vier Fahr-Dreh-Modulen.
Siehe auch
Weblinks
Quellen
- Joachim Hertzberg et al., Mobile Roboter, Springer Verlag, eXamen.press, 2012