Stufenloses Getriebe
Ein stufenloses Getriebe ist ein Rotation übertragendes Getriebe, bei dem die Übersetzung stufenlos einstellbar ist. Es wird häufig in Werkzeugmaschinen und als Fahrzeuggetriebe verwendet.
Zur Bezeichnung derartiger Getriebe werden oft Abkürzungen aus dem Englischen übernommen:
- CVT steht für Continuously Variable Transmission, also ein stufenloses Getriebe, das einen begrenzten Regelbereich hat. Ein Fahrzeug mit Verbrennungsmotor und CVT benötigt eine Anfahrkupplung.
- IVT steht für Infinitely Variable Transmission, also ein stufenloses Getriebe, das zwischen einem festen Übersetzungswert in einer Übertragungsrichtung beliebig ins Langsame („unendlich“, ∞) oder auch in die Gegenrichtung (negativ) untersetzen kann, so dass sich die angetriebene Welle dreht, während die abgetriebene Welle steht. Dadurch kann im Fahrzeug die Anfahrkupplung entfallen. Derartige Getriebe werden mit zusätzlichen Planetenradsätzen verwirklicht.
Der Begriff Regelbereich entspricht der Spreizung beim Stufengetriebe, also dem Verhältnis von größter zu kleinster Übersetzung. Bei CVTs mit Laschenkette liegt der Faktor meist zwischen 5 und 6[1] (im Automobilbau bis zu 8), mit Schubgliederband etwas tiefer und mit Kunststoffkeilriemen (zum Beispiel in Motorrollern) bei etwa 3. Keilriemengetriebe mit Ketten unterliegen dem Polygoneffekt, das heißt die Übersetzung ist nicht konstant, ihr sind Schwingungen überlagert, deren Frequenz von der Kettenteilung abhängt. Dies macht sich durch ein pfeifendes Betriebsgeräusch bemerkbar. Bei der Audi Multitronic ist die Teilung der Wiegegelenkkette variabel, die unterschiedlichen Längen der Glieder sind zufällig in der Kette verteilt, um das Pfeifen zu unterdrücken.
Stufenlose Getriebe werden in Straßenfahrzeugen meist als mechanische Getriebe gebaut. In langsamfahrenden Baumaschinen mit hydraulischen Nebenantrieben gibt es auch hydrostatische Getriebe für den Fahrantrieb, bei denen ein Strömungsmedium die Leistung überträgt. Eine weitere Form der stufenlosen Getriebe sind elektrische Getriebe (Motor/Generator), beispielsweise bei dieselelektrischen Antrieben von Lokomotiven.
Grundlagen

Bei stufenlosen Getrieben kann das Verhältnis der Drehzahlen der treibenden und der getriebenen Wellen, die Übersetzung, in einem bestimmten Bereich stufenlos geändert werden. Das kann auch den Stillstand (IVT) oder die Drehrichtungsumkehr einer Welle bedeuten.
Die Drehmomentübertragung in einem stufenlosen mechanischen Getriebe ist in der Regel reibschlüssig. Ausnahme ist das formschlüssig arbeitende Kettengetriebe nach Abott, bekannt unter dem Markennamen PIV-Getriebe, die Kraft überträgt eine Kette mit quer angeordneten, seitlich verschiebbaren Blechlamellen, die im ständigen Eingriff mit zwei radial genuteten Kegelscheiben steht. Die Nuten werden gegen das Zentrum der Kegelscheiben stetig enger. Die Teilung der von den dünnen Lamellen gebildeten Zähne passt sich den schrägen Flanken der Zähne auf den Kegelscheiben an. Bei Überlastung können sich die Blechlamellen verschieben und die Kette rutscht durch.
Es gibt verschiedene Bauarten von Getrieben mit Reibschluss: Keilriemengetriebe und Wälzkörpergetriebe, das sind Reibradgetriebe mit verschiebbaren Rädern, bei denen im einfachsten Fall die Kontaktfläche längs des Radius des einen Rades verschoben werden kann. Bei den Toroidialgetrieben sind die Reibflächen Teil der Oberfläche eines Torus. An- und Abtriebsrad stehen einander gegenüber und sind über Planetenrollen miteinander verbunden.[2] Um das Übersetzungsverhältnis zu ändern, werden die Rollen geschwenkt, sodass sie auf der schnellen Seite weiter innen und auf der langsamen weiter außen laufen.
Die für Fahrzeuge entwickelten stufenlosen Getriebe sind überwiegend über reibschlüssige Kopplungen realisiert, die durch so genannten Schlupf gekennzeichnet sind. Für diesen Schlupf gibt es im Wesentlichen zwei Ursachen:
- Prinzipbedingt gibt es bei allen Konstruktionen eine Druckfläche, über die die mechanische Leistung übertragen wird, zum Beispiel die Anlagefläche des Keilriemens bei der DAF Variomatic. Geometrisch bewegen sich die Anlageflächen gegeneinander, weil sie quer zur Bewegungsrichtung leicht unterschiedliche Geschwindigkeiten haben. Bei der Variomatic gibt es nur eine Stellung (Übersetzung), in der eine Riemenscheibe in allen Punkten der Auflagefläche genauso schnell ist wie der Riemen. Hier schneiden sich die Verlängerungen aller Kegelflächen in einem Punkt. In allen anderen Stellungen der Kegelscheibe entsteht Bohrschlupf oder Bohrreibung, die sich durch eine möglichst schmale Kontaktfläche des Riemens reduzieren lässt.
- Durch die elastische Dehnung entsteht Dehnschlupf (siehe auch Riemenantriebe) an der Kontaktfläche, der von der Elastizität/Steifigkeit der Reibungspartner und den übertragenen Kräften abhängt.
Der Einsatz von reibschlüssigen stufenlosen Getrieben ist durch mehrere Faktoren limitiert:
- Maximal mögliche Hertzsche Pressung zwischen den koppelnden Kontaktflächen, um Eingrabungen oder Grübchenbildung zu vermeiden
- Zulässige Erwärmung aufgrund der Reibverluste
- Eigener Energieverbrauch, beispielsweise um Kegelscheiben zusammenzupressen
Außer mechanischen stufenlosen Getrieben gibt es weitere Lösungen:
- Hydrostatisches Getriebe: Die Leistung wird über Verschieben eines unter Druck stehenden Fluids zwischen einer Hydraulikpumpe und einem Hydraulikmotor übertragen. Die mechanische wird somit durch eine hydraulische Kopplung ersetzt.
- Hydrodynamische Drehmomentwandler: Die Leistung wird durch eine strömende Bewegung eines Fluids bei geringem Druck übertragen. Hydrodynamische Drehmomentwandler sind üblicherweise vollständig selbstregelnd, die Übersetzung kann von außen nur eingeschränkt beeinflusst werden. Dazu werden verstellbare Leitschaufeln verwendet, oder Schöpfrohre, mit denen der Wandler zum Teil oder ganz entleert werden kann.
- Elektrisches Getriebe: Die Leistung wird als steuerbare elektrische Energie zwischen einem Generator und einem Elektromotor übertragen.
Beschreibung
Bei mechanischen stufenlosen Getrieben sind mehrere Bauarten bekannt:
- Umschlingungsgetriebe, welche die Kraft entweder über Zugmittel übertragen (breite Keilriemen, Lamellenketten); sie werden üblicherweise als CVT gebaut.
- Schubgliederbänder, die Druckkräfte übertragen.
- Wälzkörpergetriebe (Kegelringgetriebe, Toroidgetriebe wie das Extroid CVT) können auch als IVT gebaut werden.
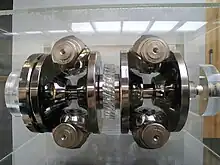
Zentrales Element für die Kraftübertragung bei einem Zugmittel-Getriebe ist der Variator. Er besteht aus zwei axial verschiebbaren Kegelscheibenpaaren und einem dazwischen laufenden Zugmittel.
Ausführungen


Das Umschlingungsmittel der Kegelscheibenpaare besteht wahlweise aus:
- einem Schubgliederband
- einem Keilriemen (siehe auch Riemengetriebe)
- einer Laschenkette (siehe auch Multitronic)
- einer Lamellenkette (siehe auch formschlüssige Kettengetriebe)
Hauptunterschied der Ausführungen ist:
- Das Schubgliederband überträgt in den meisten Betriebszuständen das Drehmoment durch Druckkräfte, das heißt, die Leistung wird von den Schubgliedern übertragen, die das flexible Band nur zusammenhält.
- Der Keilriemen arbeitet kraftschlüssig und hat Schlupf. Je breiter der Keilriemen, desto größer kann die Getriebespreizung sein. Das Betriebsgeräusch des Keilriemens ist geringer und er kann ohne Schmierung laufen. Das maximal übertragbare Drehmoment ist relativ gering.
- Die Laschenkette arbeitet kraftschlüssig. Das maximal übertragbare Drehmoment beträgt bis zu 400 Nm. Die Änderung des Übersetzungsverhältnisses ist bei CVT-Getrieben in Automobilen im Verhältnis 1:7 bis 1:8 möglich.
- Die Lamellenkette arbeitet formschlüssig und damit schlupffrei.
Funktion
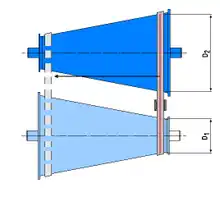
Ein Kegelscheibenpaar ist mit dem Antrieb verbunden, das andere mit dem Abtrieb. Jeweils eine diagonal gegenüberliegende Hälfte der Kegelscheibenpaare ist auf den Wellen fixiert, während die jeweils andere Scheibe auf der Welle axial geführt, gesteuert verschoben werden kann.
Wenn die Kegelscheiben weit voneinander entfernt sind, beschreibt das Zugmittel einen kleinen Radius auf der Kegelfläche. Sind die Kegelscheiben dagegen nah beieinander, folgt das Zugmittel einem großen Radius auf der Kegelfläche.
Die Kegelscheibenpaare bewegen sich dabei gegenläufig, damit bei gleich bleibender Zugmittellänge und Achsabstand das Zugmittel vorgespannt bleibt.
Ein kleiner Zugmittel-Radius im Antriebs-Kegelscheibenpaar entspricht einem kleinen Gang eines konventionellen Getriebes, ein großer Radius einem großen Gang.
Sind die Kegelscheiben weit voneinander entfernt und werden die Kegelscheiben zusammengedrückt, vergrößert sich der Zugmittel-Radius und damit das Übersetzungsverhältnis von klein auf groß. Da dieser Vorgang stufenlos ist, verändert sich das Übersetzungsverhältnis ebenfalls stufenlos.
Infinitely Variable Transmission (IVT)

Bestimmte stufenlose Getriebe, wie das Toroidgetriebe, hydraulische Getriebe, oder die Kombination eines oder mehrerer Planetengetriebe mit einem stufenlosen Getriebe können einen „unendlichen“ Übersetzungsbereich abdecken. So kommt das Fahrzeug bei Übersetzung „unendlich“ im Stand, bei laufendem Motor, ohne zusätzliche Trennkupplung aus.
Ein Beispiel sind moderne stufenlose Getriebe in Traktoren, etwa das Vario-Getriebe des Traktorenherstellers Fendt. Ein Planetengetriebe dient als Kraftweiche und teilt die Kraft des Antriebsmotors in den Antrieb der Räder und den einer stufenlos verstellbaren Hydropumpe auf. Im hydrostatischen Teil der Kraftübertragung wird die Energie der Hydraulikflüssigkeit zwei ebenfalls stufenlos verstellbaren Hydromotoren zugeführt und steht dem Antrieb der Räder wieder zur Verfügung. Das Übersetzungsverhältnis wird über den hydrostatischen Zweig geregelt. Durch die Leistungsverzweigung ergibt sich ein weiterer Vorteil: Der Leistungsanteil des stufenlosen (hydrostatischen) Leistungszweiges kann in den meisten Betriebspunkten gering gehalten werden, wodurch dessen schlechterer Wirkungsgrad nicht so sehr ins Gewicht fällt.[3]
Das Getriebe (Power Split Device) des Hybridfahrzeugs Toyota Prius ist vergleichbar aufgebaut, wobei hier der stufenlose Teil aus einem elektrischen Getriebe (Generator und Elektromotor) besteht. Das System wird von Toyota unter dem Namen Hybrid Synergy Drive vermarktet.
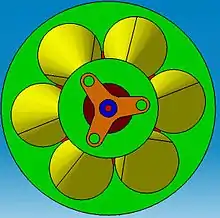
NuVinci-Getriebe

Sein Grundprinzip wurde bereits von Leonardo da Vinci beschrieben. Der Name NuVinci (new, engl. neu) ist davon abgeleitet. Es ist ein stufenloses Planetengetriebe mit Reibschluss zwischen Kugeln und Kegelflächen. Durch Kippen der durch die Kugeln führenden, im Getriebegestell gelagerten Achsen rollen diese mit unterschiedlich großen Radien auf den Rändern der seitlich angeordneten Scheiben, was ein unterschiedlich großes Übersetzungsverhältnis ergibt.[4]
X-CONI-Getriebe
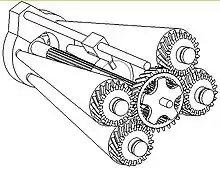
Die sogenannten X-CONI-Getriebe lehnen sich in ihrer Funktion an die Kegelringgetriebe an, können aber mehr Drehmoment übertragen. Sie sind in der Regel gleichachsig und funktionsbedingt leistungsverzweigt ausgeführt und für heckgetriebene Fahrzeuge gut geeignet. Grundprinzip ist eine konzentrische Anordnung nahezu aller Bauteile im Getriebe. Die Kraft fließt nach dem Anfahrelement (Kupplung, Drehmomentwandler etc.) auf den Planetenträger. Ein Teil geht auf die Abtriebswelle mit Sonnenrad, der andere Teil auf ein Hohlrad mit Innen- und Außenverzahnung. Das Hohlrad treibt die als äußere Planeten orientierten Kegel an. Diese sind um den halben Kegelwinkel geneigt und bilden dadurch einen Zylinder, in dem der „Centerdrive“ – das Übertragungsrad – translatorisch auf der Abtriebswelle über eine Verschiebeeinheit bewegt werden kann. Die für die toroidische Übertragung notwendige Anpresskraft wird von den Kegeln selbst erzeugt. Um ein hohes Drehmoment übertragen zu können, lässt sich auch eine Trennung zwischen Traktionsbereich und Schmierbereich realisieren.
Die Ausführungen als QuattroCONI (4 Kegel) oder HexaCONI (6 Kegel) sind sinnvoll, aber auch eine andere Anzahl Kegel ab zwei aufwärts ist denkbar, zum Beispiel als Modulbauweise für verschiedene Leistungen.
Wenn höchste Drehmomentübertragung gefordert ist, zum Beispiel für Nutzfahrzeuge, bietet sich die Ausführung aus Duo-X-CONI an, in der ein zweiter Satz Kegel nachgeschaltet ist.
Anwendungen
Mechanische stufenlose Getriebe
Im Maschinenbau, vor allem in Werkzeugmaschinen, war vor der breiten Einführung elektronisch regelbarer Motoren das stufenlose Getriebe mit Lamellenkette (ein Markenname: „P.I.V.“) weit verbreitet.

Auch im Fahrzeugbau wurden stufenlose Getriebe eingesetzt. Der breiten Öffentlichkeit bekannt wurden sie erstmals als Variomatic in Fahrzeugen von DAF, die vorwärts wie rückwärts gleich schnell fahren konnten. Der französische Moped-Hersteller Motobécane begann bereits Ende der 1940er mit der Entwicklung einer stufenlosen Kraftübertragung und fertigte in den 1950ern den resultierenden Typ Mobymatic.[5] Die Fliehkraftkupplung wurde hier vom Hinterrad angetrieben. Ein Kraftschluss kam erst ab einer Geschwindigkeit von etwa 7 km/h zustande, auf die das Fahrzeug zuvor mit Muskelkraft beschleunigt werden musste. Von 1954 bis 1957 baute DKW den Motorroller DKW Hobby mit stufenlosem Riemengetriebe (System Uher) in einer Auflage von 45.303 Einheiten. Im Gegensatz zum Mobymatic-Typ wurde beim System Uher die Fahrgeschwindigkeit allein durch die Motordrehzahl bestimmt, was Probleme beim Befahren von Steigungen mit sich brachte. Seit den 1980er Jahren wurden Kleinkrafträder (Mofa/Moped) in Großserie von Honda (zum Beispiel im Mofa Camino) und dem italienischen Hersteller Piaggio (zum Beispiel im Hexagon) mit einem stufenlosen Keilriemengetriebe und einer Fliehkraftkupplung gefertigt. 1987 brachte der Automobilhersteller Subaru den Kleinwagen Justy mit einem elektronisch gesteuerten, ECVT genannten stufenlosen Getriebe auf den Markt. Im gleichen Jahr stellte Ford das stufenlose CTX-Automatikgetriebe für die zweite Baureihe des Fiesta vor. Der Fiat-Konzern verwendete diese Getriebe in den Automatikversionen des Fiat Panda I (141A), Uno, Punto I, Tipo sowie Lancia Y10 und Lancia Y unter dem Namen Selecta bzw. Selectronic.
Mittlerweile finden sich stufenlose Getriebe beispielsweise in Antrieben von Motorrollern und auch in Personenkraftwagen bis 191 kW (260 PS) (zum Beispiel Audi-Multitronic) mit Ketten und bis 350 Nm mit Schubgliedern. Eine Elektronik regelt das stufenlose Getriebe so, dass sich der Motor in einem möglichst optimalen Betriebsbereich befindet:
- Besonders sparsam im Bereich des geringsten spezifischen Kraftstoffverbrauchs (siehe Muscheldiagramm), meist „Economy“ genannt
- Beim Beschleunigen wechselt die Übersetzung so, dass der Motor im Drehzahlbereich der maximalen Leistung (nicht Drehmoment, da Getriebe Kennungswandler ist!) bleibt (zum Beispiel zum Überholen, meist „Power“ genannt).
- Während des Beschleunigens kann der Motor bei konstanter Drehzahl seine maximale Leistung abgeben, während die Geschwindigkeitszunahme über das stufenlose Getriebe ausgeglichen wird. Das hat den anfangs irritierenden Effekt, dass bei gleichbleibendem Motorgeräusch die Geschwindigkeit stetig zunimmt („Gummiband-Effekt“).
- Zusätzliche Funktionen der Übersetzungssteuerung dienen beispielsweise der verbesserten Abgasbehandlung, zum Beispiel Drehzahlanhebung zur Filter-Regeneration oder für den Betrieb anderer drehzahlabhängiger Nebenaggregate (Klimakompressor, Generator und andere).
Eine Variante des stufenlosen Getriebes als Reibradgetriebe mit winkelveränderlichen Rollen ist das 1999 vorgestellte Nissan-Extroid-CVT-Getriebe. Es war zunächst wegen einer überdimensionierten Hydraulik und einem ungünstigen Wirkungsgrad in kleinen Kraftfahrzeugen noch zu schwer und zu teuer. Allerdings wurde das technische Potenzial der rollreibenden und damit extrem leisen, komfortablen stufenlosen Kraftübertragung erkennbar. Eine andere Variante mit Rollreibungsübertragung ist das Kegelringgetriebe.
Die Mercedes-Benz A- und B-Klasse sowie der Dodge Caliber wurden mit einem stufenlosen Automatikgetriebe mit virtuellen Gängen ausgestattet, die auch wahlweise per Hand geschaltet werden können. Auch der Honda Jazz (ab 1,4 l, bis 09/2008), der Mini und der Ford Focus (nur 1,6 l Diesel, sowie 1,8 l Benziner und nur bis Februar 2007) waren optional mit einem stufenlosen Getriebe erhältlich. Auch in den Toyota-Modellen iQ, Verso, Verso-S, Avensis (ab 2009) und RAV4 (ab 2009) ist optional ein stufenloses Getriebe („Multidrive-S“) verfügbar. Bei Subaru ist für einige Modelle ein „Lineatronic“ genanntes stufenloses Getriebe verfügbar (2.0i und 2.5i Ottomotor, beim Outback seit 2014 auch in Verbindung mit 2.0D Dieselmotor). Weitere Hersteller, die für bestimmte Ausführungen verschiedener Modelle stufenlose Getriebe einsetzen oder einsetzten, sind Jeep (Compass und Patriot), Mitsubishi (Lancer), Nissan (Altima, Cube, Juke, Maxima, Micra, Murano, Note, Qashqai, Rogue, Sentra, Sunny, Tiida und X-Trail), Proton (Inspira, Iriz, Prevé und Saga), Renault (Koleos), Rover (216i) und Suzuki (SX4 S-Cross).
Die kompakte 3-kg-Haushalts-Waschmaschine Eudora aus Gunskirchen, OÖ. wurde ab etwa 1960 statt mit Handhebelsteuerung mit Schleuderautomatik hergestellt. Der Motor ist auf einer Wippe montiert, so dass sein Gewicht den Keilriemen zur großen, auf der Waschtrommelachse sitzenden Riemenscheibe spannt, die im Waschbetrieb mit etwa 100 Umdrehungen pro Minute rotieren. Das Paar stumpfkegeliger Scheiben auf der Motorachse ist dabei vom Riemenzug axial auseinandergepresst, so dass beim Waschen über den kleinstmöglichen wirksamen Durchmesser dieses Antriebs nur eine geringe Riemengeschwindigkeit auf die große Abtriebsriemenscheibe wirkt. Zum Schleudern wird nun der Asynchronmotor mit weniger Polen betrieben und erhöht so seine Drehzahl auf gut das Doppelte. Dadurch unterliegen 6 keilförmige Eisengewichte erhöhter Fliehkraft, gleiten in glatten Kunststoffführungen im Antrieb ein Stück nach außen und pressen die hintere der Kegelscheiben zur vorderen, wodurch der Keilriemen sukzessive auf mehr als den doppelten Durchmesser aufreitet und 550/min Schleuderdrehzahl (Typ: Super38 EU442)[6] der Trommel erreicht wird. Das variable Getriebe durchläuft dabei seinen gesamten Übersetzungsbereich binnen etwa 5 Sekunden, während die Trommel dabei von Waschdrehzahl ausgehend hochdreht. Dabei wird der Motor entsprechend dem zusätzlichen Bedarf an Keilriemenlänge angehoben. Wird durch einen simplen Drehhebel dieser Motorhebung eine Sperre entgegengestellt, ändert sich am Durchmesser des Riemenantriebs fast nichts und die Maschine schleudert schonend mit etwa halbem Tempo.
Hydrostatische stufenlose Getriebe
Bei Baumaschinen sind hydrostatische stufenlose Getriebe üblich. Bei Traktoren konnten sich rein hydrostatische Getriebe wegen des mäßigen Wirkungsgrades hingegen kaum durchsetzen. Aufgrund der Leistungsverzweigung wird meist nur ein kleiner Leistungsanteil hydrostatisch übertragen und der Rest mechanisch, wodurch sich der Gesamtwirkungsgrad des Getriebes gegenüber einer rein hydrostatischen Lösung verbesserte. Es gibt verschiedene Bauarten (Eingangskopplung, Ausgangskopplung, Compoundkopplung) zur Verzweigung der Kraft in einen mechanischen und einen hydraulischen Anteil. 1995 präsentierte Fendt das Variogetriebe mit Ausgangskopplung. Andere Hersteller brachten später ähnliche Lösungen auf den Markt. Mittlerweile bieten alle führenden Hersteller stufenlose Traktorgetriebe an, bei Standardschleppern ist ein eindeutiger Trend zum hydromechanischen stufenlosen Getriebe festzustellen.
Dieselelektrischer Antrieb
Bei Lokomotiven und Schiffen wird häufig eine Kombination aus Verbrennungsmotor, elektrischem Generator und Elektromotor zur stufenlosen Drehzahl- und Drehmomentwandlung verwendet. Dieselelektrischer Antrieb ist typisch für Arbeits- und Forschungsschiffe, aber auch große Kreuzfahrtschiffe werden damit ausgerüstet. Dieselelektrische Antriebe konnten insbesondere früher nur bei hohen Leistungen mit hoher Effizienz realisiert werden. Sie haben stets eine hohe Gesamtmasse und sind auf größere Fahrzeuge beschränkt.
Drehmomentübernahme beim Schalten
Ähnlich wie bei einem hydrostatischen stufenlosen Getriebe kann das Verhalten eines Schaltgetriebes (Hydraulikgetriebe oder Zahnradgetriebe) erheblich verbessert werden, wenn eine Leistungsverzweigung stattfindet. Während der Umschaltung übernimmt ein (verlustbehafteter) zusätzlicher Strang das Drehmoment und verhindert eine Drehmomentunterbrechung. Das ist nicht nur aus Komfortgründen erwünscht, sondern zum Beispiel bei Antrieben erforderlich, bei denen das Drehmoment unterbrechungsfrei anliegen muss (z. B. Traktor beim Pflügen). Da der Umschaltvorgang nur kurze Zeit dauert, ist der Gesamtwirkungsgrad hoch. Verschiedene Konstruktionen sind auch mithilfe elektrischer Motoren verwirklicht worden: Bei den tschechischen Triebwagen ČSD M 290 (1936) war der Stator des Generators drehbar und über ein Getriebe mit den Rädern verbunden und beim Hybrid Synergy Drive von Toyota für Kfz koppelt ein Planetengetriebe Motoren und Generatoren auf den Antrieb.
Weblinks
- NuVinci-Getriebe: Animation NuVinci N360 – Fallbrook Technologies Inc. (deutsch, 4. April 2014) und auf YouTube (deutsch, 15. Januar 2012)
- Animation Schubgliederband-CVT
- Toroidgetriebe (IVT) von Torotrak und Technical Paper 2009 (PDF-Datei; 430 kB)
- Bilder (französisch)
- Suzuki Electronically-controlled (Französisch & English interaktive)
- http://www.piv-drives.com/index01.asp
- http://cvt.com.sapo.pt/toc_en.htm
- (WARKO's working principle)
Einzelnachweise
- Nach Harald Naunheimer, Bernd Bertsche, Gisbert Lechner "Fahrzeuggetriebe – Grundlagen, Auswahl, Auslegung und Konstruktion", Kapitel 4.4 "Übersetzungen und ihre Änderung bei Stufenlosgetrieben", 2. Aufl. Springer Berlin Heidelberg New York 2007, ISBN 978-3-540-30625-2
- Traction Drives and Toroidal Variators. Abgerufen am 11. Oktober 2021.
- Fendt: Variogetriebe – das Herzstück eines jeden Fendt-Schleppers. Abgerufen am 24. August 2014.
- Fahrradgetriebenabe NuVinci der Firma Fallbrook, Hub-Diagramm
- Stufenlose Kraftübertragung an Zweiradkraftfahrzeugen. In Kraftfahrzeugtechnik 10/1957, S. 376–380
- Bedienungsanleitung Waschvollautomat EU 442 "38 SUPER", abgerufen am 10. Januar 2015
{kind=link}