Frequenzumformer
Ein Frequenzumformer, auch Frequenzwandler genannt, ist eine rotierende elektrische Maschine, die Wechselspannung einer bestimmten Netzfrequenz in eine Spannung mit einer anderen Frequenz umwandelt. Frequenzumformer wurden benötigt, um Verbraucher oder Netze mit der notwendigen Frequenz zu versorgen, wenn diese nicht vom vorhandenen Netz zur Verfügung gestellt wird.[1] Durch die Weiterentwicklung bei den Halbleiterbausteinen werden heutzutage statt mechanischer Frequenzumformer meistens elektronische Frequenzumrichter verwendet (auch als statische Frequenzumformer bezeichnet), außer in einigen Bahnstromumformerwerken.


Ähnliche Anlagen, die Gleichstrom in Wechselstrom wandeln sind Umformer.
Grundlagen
Durch Frequenzumformer wird aus der Netzfrequenz ein Drehstrom mit niedrigerer oder höherer Frequenz erzeugt, je nach Bauart zwischen 6 Hz und 800 Hz. Als Antriebsmaschinen dienen meistens Drehstromasynchronmotoren oder in bestimmten Anwendungsfällen auch Drehstromsynchronmotoren. Durch die starre Kupplung ist die mechanische Drehzahl des Frequenzwandlers (Generators) genauso groß wie diejenige des Elektromotors.[2]
Vor- und Nachteile gegenüber Frequenzumrichtern
Werden Frequenzumformer zur Frequenzumwandlung eingesetzt, können Netzrückwirkungen ausgeschlossen werden. Zudem bestehen die spezifischen Eigenschaften rotierender Maschinen gegenüber statischen Umrichtern (hohe Kurzschlussströme, Trägheit der rotierenden Massen etc.). Auch wird dem Verbraucher eine Spannung mit geringem Oberschwingungsanteil zur Verfügung gestellt. Der Gesamtwirkungsgrad setzt sich aus dem Produkt der beiden Wirkungsgrade von Motor und Generator zusammen und liegt üblicherweise über 0,5.[3]

Bauformen
Frequenzumformer können sowohl Einzelmaschinen als auch Maschinensätze sein.
- Kleinere Frequenzumformer werden als Einwellenumformer ausgeführt. Hierbei sitzen die Rotoren beider Maschinen auf einer gemeinsamen Welle sowie die die Wicklungen und Blechpakete beider Statoren in einem gemeinsamen Gehäuse.
- Bei größeren Maschinen verwendet man Zweimaschinensatzumformer. Hierbei sind zwei getrennte Maschinen miteinander gekuppelt.[1]
Bauarten
Es gibt folgende Bauarten von Frequenzumformern:
- Asynchrone Frequenzumformer (Drehstrom-Asynchronmotor als Antrieb)
- Synchrone Frequenzumformer (Drehstrom-Synchronmotor als Antrieb)
- Frequenzumformer mit Stromwender.[4]
Asynchrone Frequenzumformer
Asynchrone Frequenzumformer erzeugen höhere Frequenzen, wodurch Drehstrommotoren mit höheren Drehzahlen betrieben werden können.[1]
Aufbau
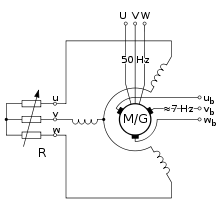
Asynchrone Frequenzumformer bestehen aus einem antreibenden Drehstrom-Asynchronmotor und einem mechanisch gekuppelten Schleifringläufermotor. Die Statorwicklungen beider Maschinen des asynchronen Frequenzumformers werden über einen Schalter an das Netz angeschlossen. Das Ausgangsnetz für die Verbraucher wird an die Schleifringe des Schleifringläufers angeschlossen.[5] Je nach Läuferausführung beträgt die Läuferspannung zwischen 42 Volt und 500 Volt. Schleifringläufermaschinen, bei denen die Ausgangsspannung kleiner als 125 Volt ist, haben einen sehr hohen Ausgangsstrom. Bei diesen Maschinen wird eine andere Schaltungsvariante angewendet. Das Ausgangsnetz (Sekundärnetz) wird mit der Statorwicklung verbunden und das Eingangsnetz (Primärnetz) wird an den Läufer des Schleifringsläufers angeschlossen. Die übliche Schaltungsvariante ist aber wie zuerst genannt.[4]
Frequenzumformung
Wird an dem Stator eines Schleifringläufermotors eine Wechselspannung angelegt, so kann man an den drei Läuferklemmen eine Drehspannung abgreifen. Dies ist die auf dem Leistungsschild angegebene Läuferstillstandsspannung.[5] Es handelt sich hierbei um die so genannte Transformatorenwirkung mit Schlupf s=100% und der Frequenz . Wird der Schleifringläufermotor angetrieben, so ist die Frequenz dieser Drehspannung variabel. Bei einer Drehung in Richtung Drehfeld wird die Schnittgeschwindigkeit vermindert. Dadurch nehmen Läuferfrequenz und Läuferspannung proportional mit dem Schlupf ab.[4]

Die Frequenz und auch die Spannung lassen sich folglich nur über eine Erhöhung der Schnittgeschwindigkeit steigern. Die Schnittgeschwindigkeit wiederum lässt sich auf zwei Arten erhöhen:
- der Läufer wird erheblich schneller in Drehfeldrichtung angetrieben. Dieses bezeichnet man als negativen Schlupf
- Der Läufer wird entgegen dem Drehfeld angetrieben. Dieses bezeichnet man als inversen Schlupf. (s > 100%) oder inverse Richtung. Diese Antriebsart ist in der Praxis vorherrschend.
Die Frequenz der Läuferspannung und des Läuferstromes ist bei gegebener Drehzahl abhängig von der Schlupfdrehzahl und ändert sich proportional nach folgender Gleichung:


Quelle:[2]
Funktion
Bei der üblichen Schaltungsvariante erzeugt der Drehstrom aus dem Primärnetz in der Statorwicklung ein magnetisches Drehfeld. Das Drehfeld induziert in den Läuferwicklungen eine Wechselspannung, welche an den Schleifringen abgegriffen werden kann. Die Frequenz der Läuferspannung ist bei stillstehendem Läufer genauso groß wie die Netzfrequenz des Primärnetzes. Dies liegt daran, dass für beide Wicklungen die Umlaufdrehzahl des Drehfeldes gleich ist.[3] Treibt man den Läufer mit dem Antriebsmotor in Richtung des Drehfeldes an, wird die Ausgangsfrequenz kleiner, was aus der Formel ersichtlich ist:



Erst durch Antreiben des Frequenzumformers über die Nenndrehzahl lässt sich auch hier eine Frequenzerhöhung erreichen.
Wird der Läufer gegen das Ständerdrehfeld angetrieben, so schneidet die Läuferwicklung die Feldlinien öfter als im Stillstand. Die Folge davon ist, dass die Ausgangsfrequenz größer ist als die Eingangsfrequenz. Die Ermittlung der Frequenz erfolgt bei Antrieb gegen das Drehfeld gemäß folgender Formel:

Einen weiteren Einfluss auf die Ausgangsfrequenz hat zum einen die Drehzahl der antreibenden Maschine, zum anderen die Polpaarzahl der Schleifringläufermaschine. Ist die Polpaarzahl des Generators größer als die des Motors, ist die Ausgangsfrequenz höher als die Netzfrequenz. Umgekehrt wird die Ausgangsfrequenz niedriger, wenn die Polpaarzahl des Motors höher ist als die des Generators. Bei bekannten Polpaarzahlen sowohl des Frequenzwandlers als auch des Motors und der Frequenz lässt sich unter Vernachlässigung des Schlupfes die Ausgangsfrequenz anhand der folgenden Formeln überschlägig ermitteln:



- Leerlauffrequenz bei gleicher Drehfeldrichtung

- Leerlauffrequenz bei ungleicher Drehfeldrichtung

Quelle:[1]
Für einen Frequenzumformer mit einem 2-poligen Motor und einem 4-poligen Generator bedeutet dies beim Betrieb am 50 Hz Netz:
- bei gleicher Drehfeldrichtung beträgt die Ausgangsfrequenz 50 Hz.
- bei ungleicher Drehfeldrichtung beträgt die Ausgangsfrequenz 150 Hz.
Mit einer entsprechenden Drehzahl des Antriebsmotors und bei geeigneter Polzahl des Schleifringläufers kann man Frequenzen bis etwa 500 Hz erreichen.[3] Für Spezialbereiche werden moderne Frequenzumformer mit Ausgangsfrequenzen von bis zu 800 Hz gefertigt.[6] Wird das Drehfeld durch einen Wendeschalter umschaltbar gemacht, kann man mit demselben Umformer wahlweise zwei Frequenzen liefern. Diese Frequenzumschaltmöglichkeit wird bei Frequenzen oberhalb von 200 Hz häufig genutzt. Allerdings ändert sich jedoch mit der Frequenz auch die Spannung, bei doppelter Frequenz ist auch die Spannung doppelt so hoch. Bei bekannter Ausgangsspannung und bekannten Ausgangsfrequenzen und lässt sich die Ausgangsspannung anhand der folgenden Formel ermitteln:





Quelle:[2]
Betriebsverhalten
Wird der Umformer belastet, wird auch der Antriebsmotor belastet. Dadurch dreht der Antriebsmotor um den Schlupf langsamer. Durch diese Drehzahländerung des Antriebsmotors ändert sich auch die Sekundärfrequenz des Frequenzumformers. Da der Schlupf bei Drehstrommotoren gering ist, ist auch die Änderung der Sekundärfrequenz gering. Da durch die Belastung des Frequenzumformers die Drehzahl etwas kleiner wird, bilden sich in ihm Streufeldlinien. Außerdem ruft der Innenwiderstand der Ausgangswicklung Spannungsabfälle hervor. Die Spannung sinkt bei Belastung gegenüber der Leerlaufspannung um etwa 10 % ab. Bei Entlastung steigt die Spannung wieder an. Bei der Verwendung von polumschaltbaren Antriebsmotoren kann der Frequenzumformer mehrere Frequenzen liefern, allerdings ist die Spannung dann auch bei jeder Frequenz verschieden.[1]
Einsatzbereiche
Eingesetzt werden asynchrone Frequenzumformer besonders als Schnellfrequenzumformer. Diese schnellfrequenten Wechselströme (100 Hz – 500 Hz) werden zum Antrieb schnelllaufender Induktionsmotoren benötigt.[3] Insbesondere dort, wo hohe Drehzahlen bis zu 18.000 erforderlich sind, kommen Frequenzumformer zum Einsatz. Für den Laborbetrieb stattet man den Frequenzumformer mit einem Drehzahlvarianten-Antrieb aus. So lässt sich mit dieser Technik eine Drehspannung mit einstellbarer Frequenz erzeugen. Typische Einsatzbeispiele liegen im Bereich bei Holzbearbeitungsmaschinen, Bohrmaschinen mit Induktionsmotoren, Schleifmaschinen mit Induktionsmotoren,[1] Bodenstromversorgungen von Flughäfen, Versorgung von Schiffen, Prüffelder, Radar und im Laborbetrieb.[2]

Da asynchrone Frequenzumformer sehr robust sind, konnten sie ihren Platz gegenüber Frequenzumrichtern behaupten.
Synchrone Frequenzumformer
Synchrone Frequenzumformer sind aufgebaut wie asynchrone Frequenzumformer mit dem einzigen Unterschied, dass die antreibende Maschine ein Drehstrom-Synchronmotor ist, der bei kleineren Maschinensätzen überwiegend ein Reluktanzmotor ausgeführt ist. Dadurch erreicht man eine belastungsunabhängige Drehzahl und eine bessere Spannungskonstanz.[2]
Frequenzumformer mit Stromwender
Frequenzumformer mit Stromwender werden überwiegend zur Erzeugung sehr niederfrequenter Wechselspannungen und damit zum Antrieb langsam laufender Maschinen verwendet.
Hier haben zwei Maschinentypen bis heute einen Nischenplatz behauptet:
- Schlupffrequenzumformer
- Integrierter dynamischer Frequenzumformer.[7]
Schlupffrequenzumformer
Aufbau
Der Schlupffrequenzumformer ist ähnlich dem Drehstrom-Gleichstrom-Einankerumformer aufgebaut, allerdings besitzt er keine Erregerwicklung. Die Anlaufwicklung wird an einen Stellwiderstand angeschlossen und nicht kurzgeschlossen. Durch diese Maßnahme kann der Umformer auch nach dem Hochlaufen nicht in den Synchronismus geraten. Durch mechanische Belastung mittels großer Lüftungsflügel wird ein großer Schlupf hervorgerufen, welcher sich durch den Stellwiderstand steuern lässt.
Funktion
Der Drehstrom erzeugt in der Ständerwicklung ein Drehfeld, welches sich mit einer Drehzahl dreht, die der Schlupffrequenz entspricht. Da jede Wicklung zwischen zwei Bürsten wie eine Spule wirkt, kann am Kollektor über die Bürsten ein Strom entnommen werden, der ebenfalls der Schlupffrequenz entspricht. Der Kommutator wirkt hier wie ein Frequenzumformer.
Betriebsverhalten
Schlupffrequenzumformer liefern somit Frequenzen, die wesentlich kleiner als die Netzfrequenz sind: je nach Schlupf 6 Hz – 16 Hz. Auf der Abgabeseite ist die Spannung ziemlich unabhängig von der Frequenz.
Einsatzbereiche
Zur Drehzahlsteuerung von Drehstromkurzschlussläufermotoren werden Schlupffrequenzumformer auch heute noch eingesetzt. Allerdings hat ihre Bedeutung durch den Einsatz moderner Leistungselektronik in Frequenzumrichtern stark abgenommen. Typische Einsatzbereiche sind Krananlagen.[1]
Integrierter dynamischer Frequenzumformer
Der integrierte dynamische Frequenzumformer, nach seinem Entwickler auch Schrage-Richter-Motor oder Scherbius-Maschine genannt, gehört ebenfalls zur Gruppe der Wechselstrom-Kommutatormaschinen. Anders als bei anderen Frequenzumformern speist diese Maschine aber keine Leistung nach außen, sondern verwendet die Frequenzumformung nur, um maschinenintern eine Drehzahländerung zu erwirken.[7]
Aufbau
Die Statorwicklungen sind über Kohlebürsten mit dem Kommutator und somit mit der Rotorwicklung verbunden. Die Bürsten lassen sich in beide Richtungen bewegen. Der Rotor besitzt zwei Wicklungen, eine Steuerwicklung und eine Erregerwicklung. Die Steuerwicklung ist an den Kommutator angeschlossen. Die Erregerwicklung wird mit dem Netz verbunden.
Funktion
Wird die Maschine mit der Erregerwicklung ans Netz geschaltet, fließt in der Erregerwicklung ein Strom. Dieser Stromfluss in der Erregerwicklung induziert nun wiederum Ströme in den Steuerwicklungen. Das durch den Läufer entstehende Drehfeld will den Ständer zum Rotieren bringen. Dieses ist aber nicht möglich. Deshalb beginnt er selbst zu rotieren. Je nach Stellung der Bürsten lässt sich eine Drehzahländerung in untersynchrone oder übersynchrone Bereiche ermöglichen.[8]
Einsatzbereiche
Die Maschinen wurden als läufer- und ständergespeiste Ausführungen mit Leistungen von 150 kW – 1500 kW hergestellt; die läufergespeiste Ausführung konnte sich durchsetzen. Aufgrund ihres aufwändigen Aufbaus und ihrer aufwändigen Wartung wird diese Maschine heute jedoch nur noch bei wenigen Stell- und Regelantrieben eingesetzt. Typische Einsatzbereiche sind Schwer-, Textil- und Zuckerindustrie.[7]
Gesetzliche Bestimmungen und sonstige Regelwerke
- EN 60 034 Teil 1 Allgemeine Bestimmungen für umlaufende elektrische Maschinen
- EN 60 034 Teil 8 Anschlussbezeichnungen und Drehsinn für elektrische Maschinen
- DIN IEC 34 Teil 7 Bauformen umlaufender elektrischer Maschinen
- EN 60034-5 Schutzarten umlaufender elektrischer Maschinen
- EN 60034-6 Kühlarten drehender elektrischer Maschinen
Einzelnachweise
- A. Senner: Fachkunde Elektrotechnik. 4. Auflage. Verlag Europa-Lehrmittel, 1965.
- Rolf Fischer: Elektrische Maschinen. 12. Auflage, Carl Hanser Verlag, München und Wien 2004, ISBN 3-446-22693-1.
- Ernst Hörnemann, Heinrich Hübscher: Elektrotechnik Fachbildung Industrieelektronik. 1 Auflage. Westermann Schulbuchverlag GmbH, Braunschweig, 1998, ISBN 3-14-221730-4.
- Günter Boy, Horst Flachmann, Otto Mai: Die Meisterprüfung Elektrische Maschinen und Steuerungstechnik. 4. Auflage, Vogel Buchverlag, Würzburg, 1983, ISBN 3-8023-0725-9
- Günter Springer: Fachkunde Elektrotechnik. 18. Auflage, Verlag Europa-Lehrmittel, Wuppertal, 1989, ISBN 3-8085-3018-9.
- Kemmerich Elektromotoren Frequenzumformer Online (abgerufen am 13. Juli 2012; PDF-Datei; 1,6 MB).
- Ali Farschtschi: Elektromaschinen in Theorie und Praxis. 1. Auflage, VDE-Verlag GmbH, Berlin und Offenbach 2001, ISBN 3-8007-2563-0
- Paul Rauhut: Über das Kreisdiagramm des Schrage-Motors. Promotionsarbeit, Eidgenössische Technische Hochschule Zürich Online (abgerufen am 16. Juli 2012).
Weblinks
- Max Leumann: Kaskadenschaltungen von Drehstromasynchronmaschinen mit Kommutatormaschinen zur Phasenkompensation. Buchdruckerei Karl Werner, Basel 1933 Online (abgerufen am 16. Juli 2012)