Drehgruppe
Die Drehgruppe im engeren Sinn ist die spezielle orthogonale Gruppe oder auch aller Drehungen im reellen dreidimensionalen Raum (falls ) oder in der reellen Ebene (falls ), in letzterem Fall heißt sie Kreisgruppe. Ihre Elemente sind die Drehmatrizen, also orthogonale Matrizen mit Determinante eins.




Daneben wird eine Untergruppe dieser reellen Gruppen als Drehgruppe einer zwei- oder dreidimensionalen Figur bezeichnet, wenn sie alle Drehungen umfasst, die die Figur auf sich selbst abbilden, also die Untergruppe der Drehungen in der Symmetriegruppe des Körpers bzw. der Figur ist. Zur Unterscheidung wird die die volle -dimensionale Drehgruppe genannt.

Im weiteren und übertragenen Sinn werden die speziellen orthogonalen Gruppen – das sind die Untergruppen der reellen allgemeinen linearen Gruppe , deren Elemente orthogonale Matrizen mit Determinante eins sind – auch für höhere Dimensionen mit als (volle) Drehgruppen bezeichnet.



Definition und Eigenschaften
Die orthogonale Gruppe ist die Gruppe der orthogonalen -Matrizen mit reellen Elementen. Die Verknüpfung der orthogonalen Gruppe ist die Matrizenmultiplikation. Bei der orthogonalen Gruppe handelt es sich um eine Lie-Gruppe der Dimension . Da die Determinante einer orthogonalen Matrix nur die Werte annehmen kann, zerfällt in zwei disjunkte Teilmengen (topologisch: Zusammenhangskomponenten):




- die Drehgruppe aller Drehungen (orthogonale Matrizen mit Determinante ) und
- die Menge aller Drehspiegelungen (orthogonale Matrizen mit Determinante ).




Die Untergruppe heißt die spezielle orthogonale Gruppe oder die Drehgruppe.
Insbesondere ist die als die Gruppe aller Drehungen um eine durch den Koordinatenursprung verlaufende Achse im dreidimensionalen Raum von großer Bedeutung in zahlreichen Anwendungen, wie etwa der Computergraphik, der Physik oder der Robotik.

Zweidimensionale Drehungen
Die Kreisgruppe ist die Lie-Gruppe, die die Drehungen um einen festen Punkt im zweidimensionalen Raum (einer Ebene) zusammenfasst und die Hintereinanderausführung dieser Drehungen beschreibt. Eine solche Drehung lässt sich eindeutig durch einen Winkel beschreiben, die Hintereinanderausführung zweier Drehungen entspricht gerade der Drehung um die Summe der beiden Winkel der einzelnen Drehungen. Eine volle Umdrehung wird dabei wiederum mit keiner Drehung identifiziert.

Dreidimensionale Drehungen


Beschreibung durch Achse und Winkel
Eine Drehung im dreidimensionalen Raum lässt sich durch die Angabe einer Drehachse, also eines Vektors der Länge Eins auf der Einheitssphäre, und eines Drehwinkels beschreiben. Im Sonderfall erhält man die identische Abbildung; für andere Winkel, auch im Fall einer Geradenspiegelung mit , ist die Achse eindeutig festgelegt. Durch Wechsel der Orientierung der Drehachse lässt sich eine Drehung um auch als eine Drehung mit Winkel auffassen.






Die zugehörige Drehung lässt sich durch eine zugehörige Drehmatrix explizit angegeben (siehe dort).

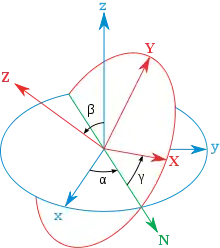
Beschreibung durch Eulersche Winkel
Auf Leonhard Euler geht eine andere Beschreibung von Drehungen über drei Winkel, die sogenannten eulerschen Winkel, zurück. Ausgehend von der Standardbasis zeigte Euler, dass sich jede Drehung als



schreiben lässt.
Dabei sind die drei Winkel mit der Einschränkung bis auf singuläre Bereiche eindeutig bestimmt: Etwa für reicht einer der beiden anderen Winkel aus.
![{\displaystyle \beta \in [0;\pi ]}](../I/07a785c32bc543dec85c65ffb7422e1479a68ebe.svg)

Die eulerschen Winkel werden häufig in der Physik verwendet; beispielsweise beruht die Beschreibung der Bahnen von Planeten oder Asteroiden durch die sogenannten Bahnelemente darauf.
Beschreibung mittels Quaternionen








Die Hamiltonschen Quaternionen gestatten eine sehr elegante Beschreibung räumlicher Drehungen. Die Quaternionen bilden eine vierdimensionale Algebra über den reellen Zahlen. Als Basis verwendet man vier besondere Quaternionen, nämlich und . Hierbei ist (die Multiplikation ist also nicht kommutativ) und es gelten die folgenden von William Rowan Hamilton angegebenen Rechenregeln: . Mit dieser Multiplikationsvorschrift – verschiedene, mathematisch exakte Konstruktionen der Quaternionenalgebra finden sich hier – wird sogar zu einem Schiefkörper: Zu jeder von null verschiedenen Quaternion lässt sich eine inverse Quaternion berechnen, für die gilt.[1]







Eine Quaternion heißt rein, wenn sie sich als Linearkombination der drei Basisvektoren und schreiben lässt. Vermöge der linearen Einbettung


mit , und identifizieren wir den mit den reinen Quaternionen. Nun lässt sich die Multiplikationsregel für Quaternionen geometrisch deuten: Das Produkt zweier reiner Quaternionen und ist zwar nicht wieder rein, aber es gilt







Der reine Anteil des Produktes zweier reiner Quaternionen entspricht also ihrem Kreuzprodukt, während der skalare Anteil (der Koeffizient vor dem Basisvektor ) das Negative ihres Skalarprodukts darstellt.
Um nun die Drehung durch eine Quaternion zu beschreiben, benötigen wir zunächst einen Winkel , dessen Doppeltes, dem gegebenen entspricht. Neben leistet dies auch . Wir betrachten nun die Quaternion





Diese Quaternion hat Länge Eins (bezüglich des Standardskalarprodukts in ) und ihr Inverses lautet


Nimmt man nun eine beliebige reine Quaternion , so lässt sich leicht nachweisen, dass die mit konjugierte Quaternion


wieder eine reine Quaternion ist (wodurch sie sich erst als für genau ein darstellen lässt). Dabei gilt nun



Mit anderen Worten: die Konjugation mit wirkt auf den reinen Quaternionen wie die Drehung .
Universelle Überlagerung der SO(3)




Die oben beobachtete Zweideutigkeit bei der Wahl von geht einher mit den beiden möglichen Vektoren zur Beschreibung der Achse: Eine bestimmte Drehung lässt sich genau durch zwei zueinander inverse Einheitsquaternionen beschreiben. Rein topologisch handelt es sich bei der Menge der Einheitsquaternionen offenbar um die dreidimensionale Einheitssphäre im vierdimensionalen Raum. Die Quaternionenmultiplikation verleiht ihr eine Lie-Gruppenstruktur. Als solche ist sie isomorph zur speziellen unitären Gruppe .[2] Wie im vorangegangenen Abschnitt diskutiert, liefert die Konjugation mit einer Einheitsquaternion eine Drehung. Offenbar handelt es sich hierbei um einen surjektiven Gruppenhomomorphismus, der in einer genügend kleinen Umgebung von einen Diffeomorphismus auf sein Bild in darstellt. Mit anderen Worten, die Abbildung





ist eine zweiblättrige Überlagerung. Da einfach zusammenhängend ist, handelt es sich um die universelle Überlagerung der .[3]

Um die anschauliche Bedeutung dieser universellen Überlagerung zu verstehen, betrachten wir den Satz vom Fußball. Durch geeignete Markierungen auf dem Ball lässt sich prinzipiell zu jedem Zeitpunkt die Drehung bestimmen, die der Ball seit dem Anstoß vollzogen hat. Dies ergibt einen stetigen Weg durch die , der bei der Einheitsmatrix beginnt. Beschreibt man die Einheitsmatrix etwa durch das Einselement von (alternativ könnte man das antipodal gegenüberliegende Element in also verwenden), so lässt sich nun der gesamte Weg in stetiger Weise zu einem Weg durch die liften. Selbst wenn man den Ball zu Beginn der zweiten Halbzeit den Markierungen entsprechend exakt gleich orientiert wieder auf dem Anstoßpunkt positioniert (damit endet der Weg durch die wieder im Punkt der Einheitsmatrix), so ist nicht garantiert, dass auch der geliftete Weg wieder bei der Eins-Quaternion angelangt ist. Mit einer Wahrscheinlichkeit von 50 % endet Letzterer vielmehr in der ; dann müsste man den Ball noch einmal um 360° bezüglich einer beliebig gewählten Achse drehen, um auch den gelifteten Weg in seinem Ausgangspunkt enden zu lassen. Da es keine höherblättrige Überlagerung der gibt, ist es nicht möglich, allgemeine Drehungen im Raum in konsistenter Weise noch feinstufiger zu erfassen.




Bemerkenswerterweise verwendet man in der Quantenmechanik die und nicht die als Zustandsraum zur Beschreibung des Spins eines Teilchens.
Topologie der SO(3)
Jede Faser der soeben beschrieben Überlagerung

besteht aus zwei Antipodenpunkten (entsprechend den beiden Möglichkeiten für die Wahl von mit ) der . Folglich ist die homöomorph zum Quotienten von bei Identifizierung gegenüberliegender Punkte. Dies ergibt aber genau den dreidimensionalen reell-projektiven Raum .



Endliche Untergruppen der SO(3)

Die endlichen Untergruppen der stehen in einem engen Zusammenhang mit Raumkörpern, die eine endliche Zahl von Symmetrien aufweisen. Da bei einer beliebigen Drehung etwa eines Würfels im Raum die zugehörige Untergruppe mit ebendieser Drehung konjugiert wird, interessiert man sich nur für die Konjugationsklassen der endlichen Untergruppen der . Diese sind:[4]
- Die zyklische Gruppen für , erzeugt von einer Drehung um den -ten Teil eines Vollwinkels ; für sind sie Teil der vollen Drehgruppe eines geraden Prismas über einem regulären -Eck.
- Die volle Drehgruppe eines solchen Prismas. Sie enthält neben der bereits beschriebenen auch diejenigen Drehungen, die auf dem regelmäßigen -Eck wie Achsenspiegelungen wirken, aber durch gleichzeitiges Spiegeln an der Trägerebene des -Ecks zu Drehungen des Raums werden. Es handelt sich um die Diedergruppen der Ordnung (formal für ; geometrische Deutung für ).
- Die volle Drehgruppe eines regulären Tetraeders. Sie ist isomorph zur alternierenden Gruppe der Ordnung .
- Die volle Drehgruppe eines regulären Oktaeders, die sogenannte Oktaedergruppe der Ordnung . Sie ist gleichzeitig für den zum Oktaeder dualen Würfel zuständig. Sie ist isomorph zur symmetrischen Gruppe .
- Die volle Drehgruppe eines regulären Ikosaeders (siehe Ikosaedergruppe) der Ordnung . Sie beschreibt zugleich die Drehungen des Dodekaeders und ist isomorph zur alternierenden Gruppe .
















Drehgruppen von Figuren
Das Wort Drehgruppe wird auch als Bezeichnung für jene Untergruppe der Symmetrien eines bestimmten geometrischen Objektes gebraucht, die eine planimetrische Figur oder einen stereometrischen Körper durch Drehung auf sich selbst abbildet. Eine solche Drehgruppe ist dann eine (meist endliche) Untergruppe der oder der und besteht genau aus allen jenen Drehungen, durch die diese Figur bzw. dieser Körper in sich selbst überführt wird.


Beispiele
- in der Ebene
- Die Drehgruppe einer Strecke stimmt mit ihrer Symmetriegruppe überein und besteht nur aus zwei Elementen: der Identität und der Drehung um 180° um den Mittelpunkt. Sie ist also isomorph zur symmetrischen Gruppe .
- Die Drehgruppe eines regulären Vielecks mit Ecken ist isomorph zur zyklischen Gruppe . Diese ist ein Normalteiler der zugehörigen Symmetriegruppe, der Diedergruppe .


- im dreidimensionalen Raum
- Die Drehgruppe des Tetraeders, eine Untergruppe der Tetraedergruppe, enthält 12 Elemente (Drehungen um 3- und 2-zählige Achsen) und ist isomorph zur alternierenden Gruppe auf der Menge der vier Ecken. Ihr Schoenflies-Symbol ist .
- Die Drehgruppe des Oktaeders und die des zu ihm dualen Würfels, eine Untergruppe der Oktaedergruppe, enthält 24 Elemente (Drehungen um 4-, 3- und 2-zählige Achsen) und ist isomorph zur symmetrischen Gruppe auf der Menge der vier 3-zähligen Achsen. Ihr Schoenflies-Symbol ist .
- Die Drehgruppe des Ikosaeders und die des zu ihm dualen Dodekaeders, eine Untergruppe der Ikosaedergruppe, enthält 60 Elemente (Drehungen um 5-, 3- und 2-zählige Achsen) und ist isomorph zur alternierenden Gruppe . Ihr Schoenflies-Symbol ist .



Anwendungen
- Satz vom Fußball – Anschauliche Anwendung der Drehgruppe .
Literatur
- Theodor Bröcker, Tammo tom Dieck: Representations of Compact Lie Groups (= Graduate Text im Mathematics. Band 98). Springer, New York NY u. a. 1985, ISBN 3-540-13678-9.
- Horst Knörrer: Geometrie (= Vieweg-Studium. Band 71). Vieweg, Braunschweig u. a. 1996, ISBN 3-528-07271-7.
- Uwe Storch, Hartmut Wiebe: Lehrbuch der Mathematik. Band 2: Lineare Algebra. BI-Wissenschafts-Verlag, Mannheim 1990, ISBN 3-411-14101-8.
Einzelnachweise
- Es ist nämlich ein reelles Vielfaches der .
- Bröcker, tom Dieck: Representations of Compact Lie Groups. 1985, S. 7.
- Bröcker, tom Dieck: Representations of Compact Lie Groups. 1985, S. 60 f.
- Vgl. Knörrer: Geometrie. 1996, S. 47.
