Dornier Spähplattform
Die Spähplattform war ein von Dornier entwickelter unbemannter kleiner Fesselhubschrauber ohne Eigenantrieb. Der Rotor wurde vor dem Start auf hohe Drehzahl gebracht, ein Drallring von 20 kg Masse speicherte die Energie, sodass das Gerät auf 50 Meter aufsteigen und dort ungefähr eine Minute schweben konnte. Mit optischen oder elektronischen Sensoren bestückt, sollte es so Nahaufklärung bis 3000 m Sichtweite ermöglichen.
Beschreibung
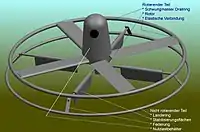
Das Gerät verfügte über einen vierblättrigen Rotor von 1,2 m Durchmesser. Die Rotorblätter waren durch eine elastische, drehbare an den Blattspitzen mit einem Drallring versehen und mit diesem elastisch drehbar verbunden. Unterhalb des Rotors mit Drallring befand sich ein zweiter, leichter Ring, der nicht rotierte, als Landegestell. Zur aerodynamischen Stabilisierung dienten vier Stabilisierungs- und Steuerflächen, die an Speichen des Landerings befestigt waren, vom Luftstrom des Rotors beaufschlagt wurden und durch einen Azimuthregler eingestellt werden konnten. Mittig oben auf dem Rotorkopf war das Sensorgehäuse angebracht. Eine durch die Mitte des Rotorkopfs verlaufende Welle verband es fest mit dem Landegestell. Als Sensor dienten selbstentwickelte Kameras mit infrarotempfindlichen Film, der nach der Landung ausgewertet wurde. Die relativ hohe Nutzlast von 5 kg zielte aber bereits auf die damals aufkommenden elektronischen Kameras.
Das gesamte fliegende System war durch ein mittig befestigtes, 50 Meter langes, dünnes Seil mit der Bodenstation verbunden, die als Transport- und Landeplattform diente. Die Steigrate und die Flughöhe wurden durch gesteuertes Nachlassen und Einziehen des Seiles bestimmt. Die Rotorblätter hatten eine zyklische Steuerung, die beim Abdriften auf den schrägen Seilzug reagierte und das Gerät zurückführte.
Zur Bodenstation gehörte die hydraulisch betriebene Aufwickeltrommel für das Seil und der hydraulische Antriebsmotor zum Hochdrehen des Rotors. Um den Rotor mit der Schwungmasse innerhalb einer Minute auf 4000 min−1 zu bringen, waren ca. 25 kW erforderlich. Der Druck sollte von herkömmlichen Mehrzweckfahrzeugen mit eingebauter Hydraulikpumpe kommen, wie z. B. einem Unimog. Die Bodenstation war als Anhänger ausgebildet und konnte mit dem Zugfahrzeug eine fahrende Einheit bilden. Für stationäre Einsätze wie auch Schiffe mit genügend installierter elektrischer Leistung waren elektrische Antriebe vorgesehen.
Da das Gerät sich lautlos in die Luft erhob, war es besonders für vorgeschobene Posten oder Vorauskommandos, auch abends und nachts mit Infrarotsensor bestückt, interessant. Ein weiterer Einsatzbereich wäre der BOS-Bereich (Behörden, Ordnungs- und Sicherheitskräfte), wie z. B. Feuerwehr oder Polizei, gewesen, die sich im Einsatzfall mit diesem Gerät schnell einen ersten Überblick hätten beschaffen können.
Das System stieß 1979/80 auf großes Interesse, eine Variante mit längerer Flugzeit war in Planung. Die Beschaffungsgänge bei Militär und Behörden sind jedoch sehr langfristig. Als 1985 Daimler-Benz die Fa. Dornier übernahm, genügte die Auftragserwartung nicht den neuen Kriterien. Das Programm wurde eingestellt und das Gerät wurde in das Deutsche Museum in München verbracht.
Technische Daten
| Kenngröße | Daten |
|---|---|
| Rotordurchmesser | 1,2 m |
| Rotorblätter | 4 |
| Antrieb | Schwungmasse 20 kg |
| Antrieb der Schwungmasse am Boden | 25 kW, Hydraulik |
| Gesamtmasse des Fluggerätes | 30 kg |
| Nutzlast | bis 5 kg |
| Schwebezeit | 1 Minute bei 5 kg Nutzlast, ohne Steigzeit |
| Steigzeit | ca. 10 s |
| Bodenstation | 80 kg ohne Anhänger |
Literatur
- Kyrill von Gersdorff, Kurt Knobling, Carl Bode: Hubschrauber und Tragschrauber, Bernard & Graefe Verlag, 1999, S. 148. ISBN 3-7637-6115-2.
- Eine Dokumentation zur Geschichte des Hauses Dornier, Hrsg. Dornier GmbH, 1983, 214 Seiten gebunden.