ETCS-Bremskurven
Die Berechnung und Überwachung von Bremskurven ist ein wesentlicher Bestandteil des europäischen Zugbeeinflussungssystems European Train Control System (ETCS).

Die Hauptaufgabe von ETCS besteht darin, sicherzustellen, dass ein Zug die zulässige Geschwindigkeit nicht überschreitet und jederzeit vor einem möglichen Gefahrpunkt zum Halt gebracht werden kann. Dazu wird jederzeit die aktuelle Geschwindigkeit mit der für die aktuelle Position errechneten zulässigen Geschwindigkeit verglichen, die mit Bremskurven bestimmt wird.[1] Die Überwachung erfolgt dabei mit einer Schar von Bremskurven.[2]
Der Bremskurvenberechnung liegt ein mathematisches Modell des Bremssystems (Bremsmodell) zu Grunde, das das kinematische Verhalten eines Zuges bei einer Betriebs- oder Schnellbremsung beschreibt und den betrieblichen Anforderungen genügt.[1][3] Wesentliche Grundlage dafür sind auf dem Fahrzeug hinterlegte geschwindigkeitsabhängige Momentanverzögerungen, die entweder aus der Bremsleistung (ausgedrückt in Bremshundertsteln) oder durch Versuche bestimmt werden können.[4] Ferner gehen in die Berechnung auf dem ETCS-Fahrzeugrechner (EVC) u. a. Zugdaten, Streckendaten (z. B. Gradiente und Adhäsionsbedingungen) sowie vom Eisenbahninfrastrukturunternehmen vorgegebene Sicherheitsziele mit ein.[5] Mittels Daten aus der ETCS-Fahrterlaubnis sowie der Odometrie kann der Abstand zu einem betrieblich bedeutsamen Punkt (z. B. Bremszielpunkt) bestimmt und somit zug- und situationsspezifische Bremskurven berechnet werden.[6]
Die ETCS-Bremskurvenberechnung wird maßgeblich im 3. Kapitel der ETCS-Systemanforderungsspezifikation (SUBSET-026)[7] beschrieben.
Bremskurven

Als Bremskurven werden alle Kurven bezeichnet, die für die Überwachung des Bewegungsverlaufs eines Zuges zur Verfügung stehen. Sie bilden den Geschwindigkeitsverlauf über den Weg nach.[3] Dabei können Anhaltewege (für Bremsungen bis zum Stillstand) wie auch Verzögerungswege (für Geschwindigkeitsreduzierungen) berechnet werden.[4]
Zur Führung und Überwachung verwendet ETCS eine Bremskurvenschar und einen Punkt:[5]
- Die Schnellbremsablaufkurve[3] (Emergency Brake Deceleration Curve, EBD) ist definiert durch eine Schnellbremsung mit garantierter, sicherer Verzögerung (aEB) bis zur Supervised Location (SvL).[5] Die EBD beschreibt den Geschwindigkeitsverlauf des Zuges nach entwickelter Bremskraft.[3] Die sichere Verzögerung enthält sämtliche[8] Sicherheitsmargen und berücksichtigt die Längsneigung der Strecke. Die Sicherheitsmargen, die auch unter dem Begriff Bremswegsicherheit zusammengefasst werden, dienen dem Ausgleich von Schwankungen bei Bremskraft, Masse und (insbesondere) Kraftschlussbeiwert von den Nominalwerten. Schnellbremsungen können zu erhöhtem Verschleiß der Bremsanlage und zu vermindertem Komfort für Reisende führen.[9]
- Die Schnellbremseinsatzkurve[3] (Emergency Brake Intervention Curve, EBI) entspricht der EBD mit einer zusätzlichen vorgelagerten Bremsaufbauzeit (tEB).[5] Beim Überschreiten der EBI wird eine Schnellbremsung eingeleitet und die Bremskraft aufgebaut.[3] Dazu wird die Hauptluftleitung[8] entlüftet und/oder eine Schnellbremsschleife geöffnet. Nach aufgebauter Bremskraft folgt der Zug der EBD.
- Die optionale Betriebsbremsablaufkurve[3] (Service Brake Deceleration Curve, SBD) wird durch eine Vollbremsung (mit Verzögerung aSB) definiert. Da bei ihrer Berechnung auch nicht sichere Bremsen angerechnet werden dürfen, kann sie eine größere Verzögerung als die EBD aufweisen.[5]
- Die optionale Betriebsbremseinsatzkurve[3] (Service Brake Intervention Curve, SBI) entspricht der SBD unter Berücksichtigung der Bremsaufbauzeit.[5] Dabei wird in zwei Varianten unterschieden: Die SBI1 wird aus der SBD abgeleitet, die SBI2 aus der EBD.[3] Soweit Strecke und Fahrzeug die Nutzung der SBI zulassen, dient sie der Vermeidung von Schnellbremsungen und am Halt vor dem regulären Halteplatz.[8]
- Die Warnkurve[3] (Warning Curve, W) ist die Bremskurve, bei deren Überschreitung der Triebfahrzeugführer akustisch gewarnt wird.[5] Sie dient als letzte Information an den Triebfahrzeugführer, dass ein Eingriff des Systems unmittelbar bevorsteht.[9]
- Die Sollkurve[3] (Permitted Speed, P) beschreibt die Sollgeschwindigkeit ohne Bremsentwicklungszeit.[5] Im aktiven Target speed monitoring ist sie damit das Minimum aus zulässiger Fahrzeug- und Streckenhöchstgeschwindigkeit und wird dem Triebfahrzeugführer als zulässige Geschwindigkeit angezeigt. Sie soll vom Triebfahrzeugführer möglichst nicht überschritten werden.[9]
- Die Information[3] (Indication Curve, I) beschreibt die Kurve, an der der Triebfahrzeugführer die Zugkraft abschalten und die Bremsung einleiten soll, um der Permitted-Speed-Curve zu folgen.[5] Die Kurve gibt es nur im Target speed monitoring.[9] Die Kurve wird unter anderem bei der Entscheidung über die kooperative Rücknahme einer Fahrterlaubnis herangezogen.[10]
- Der Indication Point (IP) informiert den Triebfahrzeugführer über eine Annäherung an den Ort zur Einleitung einer Bremsung.[5] Die Funktion entspricht dem Leuchtmelder G der Linienzugbeeinflussung.[11]
Die Nutzung der beiden Betriebsbremskurven (SBI/SBD) ist nach ETCS-Spezifikation standardmäßig zugelassen, kann jedoch vom Infrastrukturbetreiber per Nationalem Wert (Q_NVSBTSMPERM) unterdrückt werden.[12][13] Wird auf sie verzichtet, verschieben sich die W-, P- und I-Kurven zur EBI-Kurve hin, verbunden mit einer Kapazitätssteigerung.[5] Sind die SBI-Kurven aktiv, wird die restriktivere von beiden als Interventionskurve (First Line of Intervention, FLOI) bezeichnet. Werden die SBI-Kurven unterdrückt, fungiert die EBI als FLOI. Warn- und Sollkurve sind der FLOI in festen Zeitabständen vorgelagert.[9]
Optional kann eine Guidance Curve (GUI) (zu Deutsch teils Führungskurve[14]) definiert werden, mit der große Bremsverzögerungen vermieden werden können.[9] Mit der GUI wird der Triebfahrzeugführer in die Lage versetzt, komfortabel, verschleißarm und energiesparend zu bremsen.[15] Beispielsweise ist es möglich, Bremsverzögerungen zu definieren, die rein elektrisch und somit verschleißfrei realisiert werden können.[16] Auch können Bremskurven definiert werden, denen der Triebfahrzeugführer in der Praxis gut folgen kann.[17] Die Guidance Curve ist vergleichbar mit der in Deutschland verwendeten LZB-Sollkurve.[1] Ihre Nutzung muss von der Strecke (RBC) per Nationalem Wert (Q_NVGUIPERM) explizit erlaubt werden.[12][18] Infrastrukturbetreiber können damit mögliche negative Kapazitätswirkungen der GUI unterbinden.[9] Ist die Guidance Curve aktiviert, wird dem Triebfahrzeugführer das Minimum aus der Permitted Speed und der Geschwindigkeit der Guidance Curve angezeigt.[19] Der Berechnung der GUI liegt die vom Fahrzeugbetreiber relativ frei definierbare Normal Service brake zu Grunde. Ferner werden Längsneigungen bei der Berechnung der GUI berücksichtigt.[9]
Entsprechend ihrer Funktion lassen sich ETCS-Bremskurven nach Ablaufkurven (P, GUI, SBD, EBD), Interventionskurven (SBI, EBI) und Informationskurven (I, W) einteilen.[20]
ATO
Bei automatisiertem Fahrbetrieb (ATO) verläuft die erreichbare Fahrkurve nahe der Notbremseinsatz-Kurve, auf alle anderen Betriebsbremskurven wird verzichtet.[21] Die als Entwurf vorliegende ATO-Anforderungsspezifikation sieht dabei vor, dass das ATO-Fahrzeuggerät mittels Supervised Speed Envelope Management (SSEM) Bremseingriffe von ETCS vermeidet. Bei Sollgeschwindigkeits- bzw. Release-Speed-Überwachung sollen diese nicht überschritten werden. Bei Zielgeschwindigkeitsüberwachung ist einzig die Einhaltung der Zwangsbremseinsatzkurve (EBI) maßgebend; die Warntöne bei Überschreitung der Sollkurve (P) und der Warnkurve (W) werden unterdrückt.[22]
Einflussfaktoren
In die Bremskurvenberechnung gehen folgende von der Strecke bereitgestellte Daten ein: Geschwindigkeitsbeschränkungen, Längsneigungen, Bremsverbotszonen, stromlose Abschnitte, Bereiche mit verminderter Adhäsion, Geschwindigkeits- und Abstandsvorgaben sowie Nationale Werte.[23] Einige der Restriktionen werden per Track Condition übertragen.
Die Längsneigung geht in die Berechnung der EBD, SBD und GUI ein.[24] Sie wird als Verzögerungswert (A_gradient) modelliert, wobei Steigungen mit unter 0,01 m/s² zusätzlicher Verzögerung je Promille eingehen, Gefälle dagegen die Bremsverzögerung um unter 0,01 m/s² je Promille vermindern. Je größer die rotierenden Massen des Zuges, desto geringer der Einfluss auf die Verzögerung.[25]
Darstellung in der Führerraumanzeige (DMI)
In der Führerraumanzeige (Driver Machine Interface, DMI) wird dem Triebfahrzeugführer jederzeit die zulässige Geschwindigkeit angezeigt.
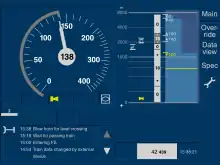
Soweit kein Wechsel auf eine geringere Geschwindigkeit auszuführen ist, befindet sich das Fahrzeug im Ceiling Speed Monitoring (CSM). Dabei überwacht ETCS lediglich die Einhaltung der zulässigen Geschwindigkeit, eine Zielbremsung ist nicht erforderlich. Wird eine Zielbremsung auf eine niedrigere Geschwindigkeit bzw. auf Halt notwendig, wird das Target Speed Monitoring (TSM) aktiv.[26] Akustisch und visuell wird der Triebfahrzeugführer dabei auf die notwendige bevorstehende Bremsung aufmerksam gemacht. Dabei verfärbt sich die Tachonadel gelb, ein vertikaler Balken zeigt die Distanz bis zum Zielpunkt an, ein gelbes Kreissegment auf der Tachoscheibe spannt den Abstand zwischen der nach Indication Curve zulässigen sowie der Zielgeschwindigkeit an.
 Tachoscheibe während planmäßiger, unbehinderter Fahrt (Ceiling Speed Monitoring). Bei einer zulässigen Geschwindigkeit von 160 km/h wird momentan 148 km/h gefahren. Eine Bremskurvenüberwachung ist nicht aktiv.
Tachoscheibe während planmäßiger, unbehinderter Fahrt (Ceiling Speed Monitoring). Bei einer zulässigen Geschwindigkeit von 160 km/h wird momentan 148 km/h gefahren. Eine Bremskurvenüberwachung ist nicht aktiv. Tachoscheibe während einer Bremsung innerhalb der Bremskurve (Target Speed Monitoring). Die Zielgeschwindigkeit, die in 930 m erreicht sein muss, beträgt 60 km/h.
Tachoscheibe während einer Bremsung innerhalb der Bremskurve (Target Speed Monitoring). Die Zielgeschwindigkeit, die in 930 m erreicht sein muss, beträgt 60 km/h. Tachoscheibe bei Überschreitung der zulässigen Geschwindigkeit (Permitted Speed). Bei einer zulässigen Geschwindigkeit von 160 km/h wird momentan 167 km/h gefahren.
Tachoscheibe bei Überschreitung der zulässigen Geschwindigkeit (Permitted Speed). Bei einer zulässigen Geschwindigkeit von 160 km/h wird momentan 167 km/h gefahren. Tachoscheibe bei Überschreitung der Eingriffsgeschwindigkeit (174 statt zulässiger 160 km/h). Ein Zwangsbremseingriff ist erfolgt.
Tachoscheibe bei Überschreitung der Eingriffsgeschwindigkeit (174 statt zulässiger 160 km/h). Ein Zwangsbremseingriff ist erfolgt.
ETCS kann mehrere Bremszielpunkte verwalten. Dem Triebfahrzeugführer wird dabei nur der relevanteste Zielpunkt („Most Relevant Displayed Target“, MRDT) angezeigt.[27][28]
Nationale Werte
Elf Nationale Werte, die vom Infrastrukturbetreiber festgelegt werden, wirken auf die Bremskurvenberechnung ein[29] und führen von Land zu Land damit zu unterschiedlichen ETCS-Bremskurven bei sonst gleichen Randbedingungen.
Während zur Bestimmung der sicheren Bremsverzögerung bislang von Land zu Land unterschiedliche und nicht öffentlich zugängliche Methoden zur Anwendung kommen, sollen diese für ETCS einheitlich bestimmt werden. In einer Expertengruppe des Internationalen Eisenbahnverbandes (UIC) wurden entsprechende, vereinheitlichende Ansätze erarbeitet. Bei der Definition der einzelnen zu Grunde gelegten Parameter verbleibt gleichwohl noch ein Interpretationsspielraum, der von verschiedenen Gutachtern unterschiedlich ausgelegt wird.[30]
Bremsmodelle
ETCS modelliert die Schnell- bzw. Vollbremseinsatzkurve in zwei Stufen:
- Die als äquivalente Bremsentwicklungszeit[4] bezeichnete Bremsaufbauzeit beginnt mit der Auslösung einer Schnell- bzw. Vollbremsung. In dieser Phase ist die Bremswirkung null. Sie endet in dem Moment, in dem 95 Prozent der maximalen Bremskraft aufgebaut sind. (Nicht berücksichtigt wird dabei die Zeit für die Abschaltung der Zugkraft. Diese fällt vor Einleitung der Bremsung.[4])
- Die anschließende Bremszeit geht von maximal aufgebauter Bremskraft aus. Sie wird als Stufenfunktion der Bremsverzögerung in Abhängigkeit von der Geschwindigkeit modelliert.
Vereinfachend geht das ETCS-Bremsmodell von einer Phase ohne und einer weiteren Phase mit voll aufgebauter Bremskraft aus, während der tatsächliche Aufbau der Bremskraft stufenlos erfolgt.
Zur Berechnung von Bremskurven benötigt ETCS Kenntnis über das nominale Bremsvermögen eines Zuges, das heute überwiegend mit Bremshundertsteln beschrieben wird.[1] Die Bestimmung von ETCS-Bremskurven ist im UIC-Merkblatt 544-1 beschrieben. Sie kann nach dem UIC-Bremsmodell (Bremshundertstel) oder aus Versuchen erfolgen. In ETCS werden diese Ansätze als Conversion Model oder Gamma-Modell bezeichnet. Beide Methoden werden im Merkblatt beschrieben.[4] Der Fahrzeugbetreiber kann grundsätzlich darüber entscheiden, nach welchem der beiden Modelle Bremskurven berechnet werden. Teils wird dabei eine Auswahl nach Bremshundertsteln[31] oder Zuglängen[31][32][33] gefordert.
Zur Gewährleistung einer ausreichenden Sicherheit übermittelt die Strecke an den Zug Korrekturfaktoren sowie die Freigabe optionaler Funktionen der Bremskurvenberechnung.[1] Dabei wird zwischen Korrekturfaktoren des Fahrzeugs und solchen der Infrastruktur unterschieden. Während die Korrekturfaktoren des Fahrzeugs durch das Eisenbahnverkehrsunternehmen definiert und verantwortet werden, werden jene der Infrastruktur vom Eisenbahninfrastrukturunternehmen festgelegt und verantwortet und von der Infrastruktur an das Fahrzeug übermittelt.[34]
Die entsprechenden Sicherheitsmargen können entweder global vom Infrastrukturunternehmen vorgegeben oder zugspezifisch über zwei Korrekturfaktoren definiert werden.[1]
Conversion Model
Mit dem von der UIC entwickelten Conversion Model (auch Allgemeines Bremsmodell der UIC für ERTMS/ETCS[4]) können Bremshundertstel in die von ETCS benötigten Bremsverzögerungen und Bremsaufbauzeiten umgerechnet werden.[1] Es wird auch als Lambda-Modell bezeichnet, nach dem für Bremshundertstel stehenden Formelzeichen Lambda.[1]
Berechnet wird dabei der Weg, der für eine Geschwindigkeitsreduzierung aus der Bremsausgangsgeschwindigkeit auf die Zielgeschwindigkeit auf trockener Schiene in der Ebene benötigt wird.[4][35] Verdeckte Sicherheitsmargen sind darin ebenso wenig enthalten wie mögliche Ausfälle von Teilen des Bremssystems.[4][35] Neben den Bremshundertsteln gehen dabei die Zuggattung (Reise- oder Güterzug), die Zuglänge sowie die Bremsstellung (G oder P) ein.[4]
Das Modell ist für maximal 900 m lange Personen- bzw. maximal 1500 m lange Güterzüge überprüft und anwendbar. Es gilt für bis zu 220 km/h, Längsneigungen von bis zu ±8 Prozent sowie 30 bis 250 Bremshundertstel.[4]
Die vom Modell gelieferten Anhalte- und Verzögerungswerte entsprechen den mittleren in Versuchen gemessenen Werten. Die vom Modell gelieferten Momentanverzögerungen spiegeln nicht unbedingt die tatsächlichen physikalischen Eigenschaften der Züge oder einzelner Fahrzeuge wider. Sie ist daher eine theoretische Größe, die zusammen mit der vordefinierten Bremsentwicklungszeit die sichere Berechnung von Anhaltewegen gewährleistet.[4]
Der statistischen Streuung der tatsächlich realisierten Bremswege wird mit Korrekturfaktoren begegnet, die als Nationale Werte übermittelt werden. Sie fußen auf einer Risikoanalyse und dem Sicherheitsziel des jeweiligen Systems.[4]
Die Bremsaufbauzeit von Personenzügen in Bremsstellung P beträgt im Conversion Model per se mindestens 5,0 Sekunden und wird mit einem dem als nationalem Wert übermittelten Korrekturfaktor Kt_int multipliziert.[36] Mit dem in Level-2-Bereichen in Deutschland üblichen Wert von 1,15 ergibt sich eine Bremsaufbauzeit von mindestens 5,77 Sekunden. Gut bremsende Triebzüge des Personenverkehrs, deren Bremsaufbauzeit häufig zwischen 1 und 2 Sekunden liegt, müssen damit etwa 4 Sekunden früher als eigentlich notwendig mit einer Bremsung beginnen.
Gamma-Modell
Mit dem Gamma-Modell wird das Bremsvermögen direkt über Bremsverzögerungen und Bremsaufbauzeiten definiert. Die Umrechnung aus Bremshundertsteln, wie im Conversion Model, entfällt.[1] Im Französischen steht Gamma für die Verzögerung.[1]
Die sichere Bremsverzögerung A_brake_safe wird im Gamma-Modell aus der nominellen Schnellbremsverzögerung A_brake_emergency, multipliziert mit den Korrekturfaktoren für trockene Schiene sowie dem für nasse Schienen berechnet.[37] Die Bremsleistung wird anhand des UIC-Merkblatts 544-1 in Fahrversuchen aus verschiedenen Bremsausgangsgeschwindigkeiten und unter verschiedenen Bedingungen bestimmt. Dazu zählen u. a. trockene Schiene und Reibelemente, eine möglichst gerade, ebene Strecke sowie definierte Beladungszustände.[4] Der Fahrzeughersteller ist für die Berechnung dieser Sicherheitsfaktoren verantwortlich.[30]
Es können bis zu sieben Verzögerungsstufen definiert werden.[4]
Für trockene Schienen
Mit dem Korrekturfaktor Kdry_rst wird sichergestellt, dass das Fahrzeug die angegebene zugesicherte Bremsverzögerung auf trockener Schiene ausreichend sicher erreicht.[1] Der Faktor beschreibt mögliche fahrzeugbedingte Abweichungen von der Verzögerung des Zuges unter Normalbedingungen (trockene Schiene).[1][30] Der Korrekturfaktor bildet dabei fahrzeugseitige Schwankungen des Bremsvermögens ab und wird mit der nominellen Schnellbremsverzögerung A_brake_emergency multipliziert.
Der Korrekturfaktor ist dabei abhängig von Geschwindigkeit, der Charakteristik des Bremssystems und dem von der Strecke geforderten Vertrauensniveau (M_NVEBCL).[1][37] Er soll für alle Geschwindigkeitsstufen und Vertrauensniveaus (EBCL) bestimmt werden.[1] Der Faktor kann nach Geschwindigkeiten und dem von der Strecke vorgegebenen Vertrauensniveau unterschieden werden.[38] Sein Wertebereich liegt typischerweise zwischen 0 und 1.[39] bedeutet dabei, dass keine Abweichungen gegenüber den Nominalbedingungen zu erwarten sind.[30]

Es gibt kein standardisiertes Verfahren für die Kdry_rst-Berechnung. Fahrzeughersteller haben damit grundsätzlich freie Auswahl für die Bestimmung des Parameters, so lange die Werte für verschiedene Vertrauensniveaus ermittelt werden können.[1] Eine mögliche Vorgehensweise wurde von der UIC-Arbeitsgruppe B126.15 vorgeschlagen, darauf aufbauend hat die Europäische Eisenbahnagentur eine auf der Monte-Carlo-Simulation aufbauende Fallstudie erarbeitet.[1]
In der Regel wird daher die Monte-Carlo-Methode, als allgemeines numerisches Verfahren zur Beschreibung des Ausfallverhaltens von technischen Systemen, herangezogen.[30] Angewendet auf Bremssysteme von Schienenfahrzeugen können damit die statische Verteilung bremsrelevanter Eigenschaften und deren Einfluss auf Bremsungen beschrieben werden. Sie wurde 2006 von der UIC vorgeschlagen und ist seit 2010 von der ERA akzeptiert.[40] Dabei wird eine sehr große Anzahl ähnlicher Zufallsexperimente in Form simulierter Bremsungen in einem Architekturmodell des jeweiligen Bremssystems mit dem Ziel durchgeführt, alle bremswegrelevanten Parameter und Funktionen abzubilden.
Dabei werden verschiedene Faktoren, die auf die Leistungsfähigkeit des Gesamtsystems Bremse Einfluss haben, modelliert und dabei mit Eintrittswahrscheinlichkeiten und statistischen Verteilungen unterlegt. Neben den einzelnen Komponenten ist dabei auch die Architektur des Bremssystems zu modellieren.[30] Im Rahmen der Monte-Carlo-Simulation werden viele () verschiedene Zustände des zu untersuchenden Bremssystems simuliert und die daraus resultierenden jeweiligen Abweichungen vom nominalen Bremsvermögen untersucht. Aus den daraus resultierenden statistischen Verteilungen werden für verschiedene Vertrauensniveaus die Korrekturfaktoren Kdry_rst so bestimmt, dass die Wahrscheinlichkeit eines Korrekturfaktors größer oder gleich Kdry_rst gleich des geforderten Vertrauensniveaus (EBCL) ist.[1]

| Land | EBCL-Wert |
|---|---|
| Belgien | 7 (Full Supervision im konventionellen Netz)[41] (99,99999 %) (ehemals 9[42] / 99,9999999 %) |
| Deutschland | 1 (Level 1 LS)[43] (90 %) 7 (Level 2)[43] (99,99999 %) |
| Finnland | 8[44] (99,999999 %) |
| Luxemburg | 9[45] (99,9999999 %) |
| New South Wales | 9[46][47] (99,9999999 %) |
| Norwegen | 8[48] (99,999999 %) |
| Polen | 9 (Level 1 LS)[49] (99,9999999 %) |
| Schweiz | 1 (Level 1 LS)[50] (90 %) 5 (Level 2)[50] (99,999 %) |
| Tschechische Republik | noch nicht definiert[51] |
Das von der Strecke vorgegebene, einzuhaltende Vertrauensniveau (Emergency Brake Confidence Level, EBCL) beschreibt damit die zulässige Wahrscheinlichkeit der Überschreitung des Gefahrpunktes.[1] Der Parameter M_NVEBCL wird infrastrukturseitig festgelegt und von der Strecke an das Fahrzeug übertragen.[30] Es beschreibt die Wahrscheinlichkeit, mit der ein Fahrzeug auf trockener Schiene die sichere Bremsverzögerung erreicht.[30] Einfluss auf den Wert können beispielsweise die Zahl der Wagen/Einheiten des Zuges, die Steuerung der Bremse (drehgestell- oder wagenselektiv), die Wahrscheinlichkeit eines Versagens der Traktionsabschaltung oder die Qualität der Bremsbeläge haben (Wahrscheinlichkeit von Chargenfehlern, die zu einem verminderten Reibwert führen).[30] Der Standardwert nach ETCS-Spezifikation beträgt 9 (99,9999999 %).[12] Bei diesem Sicherheitsziel darf nur bei einer von einer Milliarde Bremsungen die sichere Bremsverzögerung nicht erreicht und damit der Gefahrpunkt überschritten werden.
Typische Kdry_rst-Werte für Triebfahrzeuge in den Niederlanden liegen zwischen 0,70 (Worst Case bei EBCL 8) und 0,88 (Best Case bei EBCL 4).[52]
Für verschiedene für den Digitalen Knoten Stuttgart ausgerüstete Baureihen liegen die Werte – bei dem bei DB Netz verwendeten EBCL 7, je nach Zugkonfiguration und Geschwindigkeitsbereich, im Gutzustand – für die Baureihe 423 zwischen 0,76 und 0,84[53] für die Baureihe 430 zwischen 0,55 und 0,81[54] sowie für den Talent 3 zwischen 0,66 und 0,91[55]. Durch unterschiedliche Kdry_rst-Werte in Abhängigkeit von der Zuglänge kann die betriebliche Leistungsfähigkeit erhöht werden.[31][32] Beispielsweise liegen bei den für den DKS mit ETCS nachgerüsteten Talent 3 die Kdry-rst-Werte für einen einfachen Dreiteiler um 0,7 (bei EBCL 7), für den Fünfzehnteiler hingegen um 0,9.[56] Längere Züge erreichen dabei eher größere Kdry_rst-Werte, da die Wahrscheinlichkeit, dass mehrere kritische Komponenten gleichzeitig ausfallen, noch sehr viel geringer als die ohnehin geringe Wahrscheinlichkeit eines einzelnen Ausfalls ist. Je länger der Zug, desto weniger wirkt sich ein einzelner Ausfall auf die Schnellbremsverzögerung bzw. den Bremsweg aus.[39]
Die ETCS-Spezifikation trifft keine Aussagen über die Genauigkeit von Kdry_rst-Werten. An die Genauigkeit des Faktors bestehen teils Anforderungen.[31] Während einzelne ETCS-Ausrüster Kdry_rst-Werte auf volle 0,05 abrunden[39], können andere die Werte auf 0,001 genau abbilden.
Bremssysteme von (neuen) Schienenfahrzeugen können gezielt für besonders hohe Kdry_rst-Werte optimiert und Anforderungen an Bremsverzögerungen unter einem bestimmten EBCL gestellt werden.[31][39]
Für nasse Schienen
Der Korrekturfaktor Kwet_rst beschreibt den Sicherheitsfaktor für nasse Schienen, der in der Praxis unter eins liegt und aus Bremsversuchen für den Gleitschutz ermittelt wird. Er beschreibt, wie sich die Bremsverzögerung bei schlechten Haftwertbedingungen verringert.[1]
Der Bremskraftverlust durch den Einfluss von Nässe auf den Reibwert wird durch Prüfstandsversuche festgestellt.[4] Diese erfolgen nach der Norm EN 15595.[20][57]
Je größer der Wert von M_NVADAH, desto kürzer der Bremsweg.[58]
Im Bereich der DB Netz wird der Wert M_NVAVADH zu 1 gesetzt, da das aus Kwet_rst resultierende Sicherheitsniveau nicht quantifizierbar ist.[57] Damit ist die sichere Schnellbremsverzögerung für trockene und nasse Schienen identisch. Für Zugfahrten in Bereichen mit verringerter Haftreibung gelten gesonderte Bestimmungen. Unter anderem müssen Triebfahrzeugführer Geschwindigkeit und Fahrweise an die Schienenbedingungen anpassen und Bereiche mit verminderter Haftreibung dem Fahrdienstleiter melden.[20]
Geschichte
Frühe ETCS-Bremskurven
1994 legte das European Rail Research Institute einen Vorschlag zur einheitlichen Bremsbewertung von Hochgeschwindigkeitszügen durch Bremsverzögerungen (an Stelle von Bremshundertsteln und Bremsgewicht) vor.[59] Damit waren die Grundlagen für das spätere Gamma-Modell gelegt.
Die 1996 vorgelegte Version 3.01 der ETCS-Spezifikation sah ein Bremskurvenmodell vor, das aus sieben Kurven bestand: Vorgesehen waren eine Emergency Brake Intervention curve, eine Service Brake Intervention curve, eine Warning curve, eine Permitted curve, eine Traction Cut-off curve, eine Predicted curve sowie eine movement authority request curve. Während die Funktion der vier erstgenannten ihrer heutigen Funktion entsprechen, sollte die predicted curve Geschwindigkeit und Position des Zuges „in naher Zukunft“ anhand der Steuerung des Triebfahrzeugführers berechnen, um den Triebfahrzeugführer zur Bremsung aufzufordern oder ihn dabei zu unterstützen. Bei Erreichen der movement authority request curve sollte der Zug eine neue Movement Authority anfordern. Die Berücksichtigung von Längsneigungen sowie Release Speeds waren ebenfalls bereits in der ETCS-Spezifikation enthalten. Bei Erreichen der Traction Cut-off Curve soll die Traktion durch ETCS abgeschaltet werden.[60]
Auf der Schweizer ETCS-Level-2-Pilotstrecke Zofingen–Sempach, die nach vorläufigen Festlegungen von 1998 ausgerüstet und im April 2002 in Betrieb genommen wurde, wurden mehrere spezielle Bremskurven programmiert.[61]
Funkzugbeeinflussung
Für die auf der Schnellfahrstrecke Köln–Rhein/Main zunächst vorgesehene Funkzugbeeinflussung (FZB) wurden durch das Institut für Schienenfahrzeuge und maschinelle Bahnanlagen der Universität Hannover (ISB) und der Abteilung für Bremsbetrieb, Regelwerke, Bremskrafterzeugung (BT 21) des Forschungs- und Technologiezentrums der Deutschen Bahn (DB) in Minden Ende der 1990er Jahre neue Bremskurven konzipiert.[62]
Im Gegensatz zu den bis dahin für die Linienzugbeeinflussung (LZB) verwendeten Bremskurven sollten die Bremsverzögerungen dabei nicht mehr über den gesamten Bremsweg als konstant angenommen werden. So sollten Längsneigungen besser berücksichtigt, ein Bremsen mit weniger Verschleiß und mehr Rückspeisung ermöglicht sowie ein unnötig großer Abstand zwischen Soll- und Überwachungsgeschwindigkeit vermieden werden.[62] Die neuen Bremskurven wurden als geschwindigkeitsabhängige Funktion der Momentanverzögerung modelliert, womit verschiedene Verzögerungswerte für verschiedene Geschwindigkeitsbereiche angegeben werden konnten. Ferner wurde die Streckenneigung realitätsgetreu mit berücksichtigt, sodass Steigungsabschnitte bremswegverkürzend wirkten. Darauf aufbauend wurde für den FZB-Betrieb eine Schar von sechs Bremskurven gebildet:[62][63]
- Die Schnellbremseinsatzkurve (emergency brake intervention curve, EBIC) sollte eine Zwangs-Schnellbremsung auslösen. Sie sollte unter Beachtung der geforderten Bremswegsicherheit unter Berücksichtigung der Bremskraft-Entwicklungsphase aus dem Schnellbremsvermögen des Zuges gebildet werden.[63] Als einzige der vorgesehenen Bremskurven galt sie als sicherheitsrelevant, da als einzige ihr Fußpunkt an der Supervised Location (SL) am Ende des Durchrutschwegs endet. Dem gegenüber sollten alle übrigen Bremskurven am Ende der Fahrterlaubnis (End of Authority, EOA) ihren Fußpunkt haben.[62]
- Die Vollbremseinsatzkurve ([full] service brake intervention curve, SBIC) sollte automatisch eine Vollbremsung einleiten, wenn diese nicht bereits durch den Triebfahrzeugführer eingeleitet wurde, um somit den Anstoß der EBIC zu verhindern. In ihrer Berechnung sollte die Vollbremsverzögerung die Vollbrems-Entwicklungszeit einschließen. Falls kein ausreichender Abstand zur EBIC erreicht wurde, sollte die Kurve entsprechend verschoben werden, um dies zu erreichen.[63] Damit sollte der Einsatz von Magnetschienenbremsen aus Komfort- und Verschleißgründen vermieden werden.[62]
- Die Kurve zur Zugkraftabschaltung (traction cut-off curve, TCO) sollte die Zugkraft rechtzeitig abschalten, um Zugkraftfreiheit bei Erreichen der SBIC sicherzustellen. Die TCO sollte dazu aus der SBIC abgeleitet werden, indem für jeden Punkt der SBIC der notwendige Weg für die Traktionsabschaltung vorgelagert werden sollte.[63]
- Die Sollbremskurve (permitted curve, PER) sollte dem normalen Ablauf des Bremsvorgangs dienen und dem Triebfahrzeugführer als Sollgeschwindigkeit angezeigt werden. Zuvor vorangekündigte Bremsungen sollten nach erfolgtem Bremskraftaufbau entlang dieser Kurve erfolgen. Ihrer Berechnung sollten definierte Momentanverzögerungen zu Grunde gelegt werden.[63]
- Die Warnkurve (warning curve, WRN) sollte eine optische und akustische Aufforderung zur Einleitung einer Vollbremsung auslösen, um den Anstoß der EBIC zu verhindern. Sie sollte in einem frei definierbaren zeitlichen Vorlauf zur Sollbremskurve stehen. Zwischen WRN und SBIC sollte ausreichend Vorwarnzeit vorhanden sein, um dem Triebfahrzeugführer noch genügend Reaktionszeit zur Einleitung einer Vollbremsung vor der SBIC einzuräumen. Falls dies nicht der Fall gewesen wäre, sollte die WRN und die daran gekoppelte PER entsprechend verschoben werden.[62][63]
- Die Vorankündigungskurve (pre-indication curve, PIC) sollte als optische und akustische Ankündigung für die bevorstehende Bremsung dienen. Dazu sollte sie mit einer zeitlichen Konstante aus der PER abgeleitet werden.[63] Auch die Längsneigung sollte dabei mit berücksichtigt werden.[62]
Die Bremskurven wurden im Frühjahr 1998 mit dem ICE V auf ihre Praxistrauglichkeit hin überprüft. Sie haben sich dabei als für den Triebfahrzeugführer fahrbar erwiesen.[63] Unter anderem wurden verschiedene zeitliche Abstände zwischen den Bremskurven erprobt, u. a. wurde eine Zeitdifferenz von 8 s zwischen PIC und PER empfohlen.[62] Um die erforderlichen fahrzeugspezifischen Daten aufzustellen, war Ende der 1990er Jahre eine entsprechendes neues Bremsbewertungsverfahren bei der DB in Arbeit.[62]
Während die Schnellfahrstrecke Köln–Rhein/Main aufgrund von absehbaren Verzögerungen bei der ETCS-Spezifikation letztlich mit einer weiterentwickelten LZB (LZB L72 CE-II) ausgerüstet wurde,[64] bildeten die Arbeiten für das Bremskurvenmodell der FZB letztlich eine maßgebende Grundlage für ETCS.
Die weiterentwickelten LZB-Bremskurven wurden 1997 mit jenen von ETCS verglichen. Die ETCS-Bremskurven überschritten dabei durchweg die LZB-Bremskurven nicht.[65]
Unzulängliche Bremskurven der Baseline 2
Die Festlegung von Bremskurven in der Baseline 2 galt Ende der 2000er Jahre als europaweit noch zu wenig vereinheitlicht.[66] Die unzureichende Betrachtung von Bremskurven in der Baseline 2 ließ Infrastruktur- und Fahrzeugbetreibern Spielraum für Abweichungen. Dies führte zu einer Reihe von von der TSI abweichenden Sonderlösungen.[67] Für jede einzelne Strecke wurden Sicherheitsmargen des jeweiligen Infrastrukturbetreibers auf dem Fahrzeuggerät hinterlegt. Eine Übermittlung dieser Werte über die Luftschnittstelle war nicht vorgesehen.[35]
Die Bremskurvenberechnung bis Baseline 2 (einschließlich SRS 2.3.0) konnte die Erwartungen der Bahnen zu Kapazität und Betriebsbremsverläufen nicht erfüllen, die entsprechenden Bremskurven galten als nicht praxistauglich. Die SRS 2.3.0 enthielt noch keine garantiert einheitliche Bremskurvenberechnung und enthielt einige Anforderungen, die zu starken Einschränkungen der Streckenleistungsfähigkeit im Vergleich zu bisherigen Zugbeeinflussungssystemen führten. Dem Triebfahrzeugführer wurde dabei „zu viel Komfort“ zugestanden.[9]
Entwicklung der Baseline-3-Bremskurven
Aufgrund der Unzulänglichkeiten der Baseline-2-Bremskurven wurde eine Arbeitsgruppe (B126.5) eingerichtet, die zunächst bei der ERRI und später bei der UIC angesiedelt war und eng mit der ERTMS Users Group zusammenarbeitete. Zur Optimierung der Bremskurven wurden Strecken- und Simulatorversuche durchgeführt. Im Herbst 2005 wurden die optimierten Bremskurven auf der ETCS-Pilotstrecke der ÖBB, zwischen Parndorf und Zurndorf mit einem Reise- und einem Güterzug gefahren. Die Triebfahrzeugführer konnten damit die Sollgeschwindigkeit (Permitted Speed) abfahren, unerwartete Zwangsbremseinsätze traten nicht auf.[9]
Mit der Baseline 3 wurde das Conversion Model der UIC eingeführt und der Bremskurvenalgorithmus überarbeitet, um eine größere Streckenleistungsfähigkeit als mit Baseline 2 zu erreichen.[1] Die Arbeiten daran begannen um 2001. Das mathematische Modell wurde zunächst auf theoretischen Grundlagen entwickelt und anhand der Ergebnisse tatsächlicher Bremsversuche kalibriert und verfeinert. Daraus ging eine grundlegende Überarbeitung des Dokuments 97E881 hervor, das in den Change Control Process der ERA eingebracht wurde.[35] Die nach dem Conversion Model berechneten Bremswege sollten sich so wenige wie möglich von jenen des UIC-Merkblatts 544-1 unterscheiden. Das Modell wurde anhand der Ergebnisse von rund 4000 Bremsversuchen mit verschiedensten Arten von Zügen validiert. Das Verhalten des Modells wurde ferner auf einer ETCS-Pilotstrecke der ÖBB getestet und demonstriert.[68]
Ende 2006 gab es noch drei offene Punkte zur neuen Bremskurvendefinition, zu denen im Herbst 2007 noch Simulatorversuche erfolgen sollten. Im Ergebnis wollte man eine endgültige Spezifikation der ETCS-Bremskurven erhalten. Der „Komfort“ für den Triebfahrzeugführer wurde auf ein Minimum reduziert. Bei unveränderter sicherheitsrelevanter Bremskurve (EBI/EBD) wurden die vorgelagerten nicht sicherheitsrelevanten Kurven verändert. Gegenüber den Baseline-2-Bremskurven wurde der Abstand zwischen Warn- und Interventionskurve auf ein betrieblich vertretbares Minimum reduziert. Der ursprüngliche Ansatz, dass nach Überfahren der Warnkurve noch eine Intervention (FLOI) durch Einleitung einer Bremsung verhindert werden hätte können, wurde aufgrund des dann großen Abstands zwischen Warn- und Interventionskurve und der daraus folgenden reduzierten Streckenleistungsfähigkeit verworfen. Stattdessen wird dem Triebfahrzeugführer nunmehr nur noch die Möglichkeit gegeben, eine bereits eingeleitete Bremsung durch schnelle Erhöhung der Bremskraft zu verstärken.[9] Mit der Baseline 3 wurden die Guidance Curve, die Indication sowie die SBI2 neu eingeführt.[68]
War für einen Reisezug mit 210 Bremshundertstel in 6 Promille Gefälle aus 200 km/h zum Halt (ohne SBI, 50 m Durchrutschweg) beispielsweise nach SRS 2.2.2 noch eine Bremszeit von 132 s vorgesehen, konnte dieser Wert auf 82 s reduziert werden.[9]
2006 waren neben den bis heute benutzten Bremskurven (EBD, SBD, EBI, SBI, Warn- und Sollkurve sowie Guidance Curve) noch eine Kurve zur Abschaltung der Zugkraft (Traction cut-off curve, TCO) vorgesehen. Durch die TCO sollte beim Überschreiten der Warnkurve die Traktion durch ETCS abgeschaltet werden. Damit sollte auch verhindert werden, dass bei kurzem oder null Durchrutschweg (Abstand zwischen EOA und SvL) der Zug schon vor dem EOA zum Halt gezwungen wird. Neben den Kurven gab es darüber hinaus noch eine Bremsvorankündigung (Pre indication). Diese sollte den Triebfahrzeugführer informieren, dass er sich einem Streckenabschnitt nähert, in dem eine Bremsung einzuleiten ist, um einen Zielpunkt zu erreichen. Damit verbunden war der Wechsel vom Ceiling speed monitoring in das Target speed monitoring.[9]
Die Inhalte der Version 7A des Dokuments 97E881 gingen in die im Dezember 2008 veröffentlichten Entwurf der ersten Baseline-3-Spezifikation (SRS 3.0.0) ein.[35]
Kapazitätsmindernde Effekte vorheriger ETCS-Bremsmodelle sollen mit den Bremsmodellen der Baseline 3 vermindert werden.[69]
Weitere Entwicklung

Bei Simulationen der ETCS-L2-Ausrüstung der LGV Sud-Est (Paris–Lyon) wurde die Pre-Indication sehr häufig erreicht, mit entsprechend häufigen Hinweisen an den Triebfahrzeugführer. In Steigungsabschnitten lag die Geschwindigkeit der Züge dabei deutlich unter der zulässigen Geschwindigkeit. Dies führte zu einem großen zeitlichen Abstand zwischen Pre-Indication und Indication, in dem in der Regel eine aktualisierte Fahrterlaubnis übermittelt wurde, sodass der Zug nicht in das Target Speed Monitoring eintrat. Andere Bahnen berichteten ebenfalls von unnötigen Störungen.[70] Mit dem Übergang von Baseline 3 MR1 (SRS 3.4.0) zu Baseline 3 Release 2 (SRS 3.6.0) ist die Pre-Indication Location daher entfallen.[71] Die Zustimmung des Railway Interoperability & Safety Committee zur SRS 3.5.0 erfolgte unter der Auflage, die in der Version 3.5.0 noch enthaltene Pre-Indication entfallen zu lassen.[72] Mit dem Release 2 der Baseline 3 wurden die Vorankündigungszeiten gegenüber dem Release 1 systematisch verkürzt.[73]
Anfang 2020 veröffentlichte der Internationale Eisenbahnverband den Standard IRS 50544-3. Darin werden Anforderungen an Schnellbremsventile für Züge, die unter ETCS das Lambda-Bremsmodell nutzen, definiert. Die Bremsentwicklungszeit dieses Bremsmodells war zuvor anhand des Führerbremsmodells D2 von Knorr-Bremse ermittelt worden. Das neue Standard-Dokument definiert Anforderungen und Prüfverfahren, damit die ETCS-Bremswege auch bei Einsatz anderer Bremsventile eingehalten werden.[74]
Eine Arbeitsgruppe der CEN arbeitet an einer Euronorm zur Bestimmung der Kdry_rst-Werte.[75][57] Im September 2023 erschien ein Entwurf einer entsprechenden Norm (DIN EN 17997).[76] Darin wird die Ermittlung aller für Gamma-Modelle nötigen Parameter beschrieben. Dies beruht dabei auf der Entwicklung eines Bremssystemarchitekturmodells, welches alle bremskraftrelevanten Ausfallzustände abbilden kann. Im Anhang wird das Verfahren anhand zweier typischer Beispielzüge durchgerechnet.
Ausblick
An einer Vereinheitlichung der Sicherheitsmargen für ETCS wird im Rahmen der UIC-Arbeitsgruppe B126.15 gearbeitet (Stand: 2006). Dazu ist u. a. eines allseits akzeptierten Sicherheitsziels. Bis dahin müssen Sicherheitsmargen als nationale Korrekturfaktoren abgebildet werden.[9]
Für die Europäische Eisenbahnagentur liegt in der Weiterentwicklung des ETCS-Bremskurvenmodells, durch weitere Optimierung und Abwägung betrieblicher und sicherheitlicher Aspekte, ein potentieller „Game Changer“ für ETCS. Verschiedene Optimierungsvorschläge liegen vor. (Stand: 2015)[77]
Das Schweizer Bundesamt für Verkehr sieht Handlungsbedarf bei ETCS-Bremskurven, um die mit ETCS verfolgten Kapazitätsziele zu erreichen (Stand: 2019).[78]
Verbesserungspotentiale an der aktuellen ETCS-Spezifikation (Baseline 3 M2) werden unter anderem beim Bremsen auf Geschwindigkeitsschwellen nach unten sowie bei wechselnden Längsneigungen unter dem Zug gesehen.[32][39][79][80]
Ebenfalls vorgeschlagen wird, zukünftig die aktuelle Bremsverzögerung bereits bremsender Züge bei der Bremskurvenberechnung zu berücksichtigen. Dies führt nicht zu einer Verkürzung der Bremswege, vergrößert aber den Regelungsspielraum während des Bremsvorgangs für Triebfahrzeugführer bzw. ATO.[81]
Zur Optimierung innerhalb des Gamma-Modells werden Sensitivitätsanalysen zu Kraftschluss und Bremsmomenten (Belägen, Reibwerten) ebenso vorgeschlagen wie verbesserte Annahmen für Eingangsparameter anhand von Beobachtungen des Kraftschlusses im Betrieb sowie der Nutzung physikalischer Reibmodelle zur Identifikation der Streuung der Bremsmomente.[82]
DB InfraGO kündigte im April 2024 an, für eine genauere Fahrplankonstruktion ab 2026 Parameter zu Gamma-Bremsmodellen und Guidance Curves von Eisenbahnverkehrsunternehmen abzufragen.[83]
Kapazitätswirkungen
Der Kapazitätsverbrauch von Zügen mit unterschiedlichen ETCS-Versionen, Bremsmodellen und ATO-Ausrüstungen kann sich erheblich unterscheiden.[73]
ETCS-Bremskurven können restriktiver (flacher) als Bremskurven bisheriger nationaler Zugbeeinflussungssysteme sein, die für die jeweiligen Randbedingungen optimiert wurden. Sie führen in diesen Fällen zu längeren Zugfolgezeiten und damit weniger Kapazität.[8][84] Im Vergleich zu Zugbeeinflussungssystemen wie Eurosignum, die keine Bremskurvenüberwachung, keine Überwachung unzulässiger Anfahrten gegen „Halt“ zeigende Signale und keine Geschwindigkeitsüberwachung bieten, bietet ETCS mit seiner Bremskurvenüberwachung einen Sicherheitsvorteil.[85] In Ländern mit variablen Vorsignalabständen, beispielsweise Österreich, bieten die flexiblen ETCS-Bremskurven mit ihrer Möglichkeit, den tatsächlichen Abstand zum Hauptsignal zu berücksichtigen, ein größeres Sicherheitsniveau im Vergleich zu konventionellen Zugbeeinflussungssystemen mit starren Bremskurven.[86]
Ein Vergleich der Bremskurven von LZB (für ICE 3), TVM (für TGV) und ETCS (für TGV) zeigte 2006 ETCS-Bremskurven, die etwas flacher waren als jene der LZB und mit jenen der TVM vergleichbar waren.[87] Bei der Einführung von ETCS in Luxemburg erwiesen sich ETCS-Bremskurven als durchweg flacher als jene der konventionellen Leit- und Sicherungstechnik. Dies führte zur Verlegung zusätzlicher Infill-Balisen.[88]
Im ETCS-Bremskurvenmodell ist die Indication maßgebend für die behinderungsfreie Fahrt und damit die Leistungsfähigkeit.[89] Die Annäherungsfahrzeit beginnt im ETCS-Betrieb am Indication Point.[35] Dieser tritt an die Stelle eines festen Vorsignalabstandes und ist zug- und infrastrukturspezifisch.[89][90] Der Verlauf der Bremskurven ist damit von der Leistungsfähigkeit der installierten Bremsen in den Fahrzeugen abhängig. Mit abnehmender Leistungsfähigkeit werden die Bremskurven flacher, der Bremseinsatz muss früher erfolgen.[3] Dies ist bei der Planung von zeitabhängigen Streckenelementen, wie beispielsweise Bahnübergängen und Rottenwarnanlagen, zu berücksichtigen.[20] Per se müssen mit der Einführung von ETCS in Deutschland beispielsweise die Einschaltstrecken von signalgedeckten Bahnübergängen vorverlegt werden, anhand des Zuges mit dem längsten anzunehmenden Bremsweg, um eine rechtzeitige Verlängerung der Fahrterlaubnis (nach Sicherung des Bahnübergangs) sicherzustellen. Nur so kann sichergestellt werden, dass der Triebfahrzeugführer eines schlecht bremsenden Zuges bei einer Störung des Bahnübergangs noch ausreichend Reaktionszeit hat, um den Zug ohne Zwangsbremsung zum Halt zu bringen. Um die Sperrzeiten zu optimieren, wird eine direkte Ansteuerung der Bahnübergangssicherungsanlagen durch ETCS vorgeschlagen, mit Schienenkontakten als Rückfallebene.[91]
In der Schweiz führte die Einführung von ETCS zu flacheren Bremskurven, um mit zusätzlichen Sicherheitsreserven bislang vom Triebfahrzeugführer getragene Entscheidungen und Risiken zu übernehmen.[92] Durch Umstellung der konventionellen Außensignalisierung auf ETCS-Level-2-Betrieb wurde aufgrund großzügiger Sicherheitszuschläge in den hinterlegten Bremskurven und daraus folgender zurückhaltender Fahrweise die Zahl der verfügbaren Trassen um etwa 10 Prozent verringert.[93] Die durch ETCS Level 2 erhofften kapazitiven Verbesserungen sind aufgrund der kontinuierlichen, der SIL-4-sicheren Überwachung geschuldeten flacheren Bremskurven nicht eingetreten.[94] Bei der Inbetriebnahme eines ETCS-Abschnitts bei Giubiasco (Schweiz) mussten Ende Mai 2018 die Geschwindigkeiten für Güterzüge im Bereich eines ETCS-Einstiegs im Gefälle abgesenkt werden. Dies ist größeren Sicherheitsmargen geschuldet.[95] Der Verband Schweizer Lokomotivführer und Anwärter kritisierte 2019, dass sich die Zugfolgezeiten mit ETCS Level 2 gegenüber optischen Außensignalen verlängern und automatisierter Fahrbetrieb (ATO) sowie ETCS Level 3 erforderlich sei, um kürzere Zugfolgezeiten zu erreichen.[96] 2024 kritisierte er, es müssten „bei ETCS L1 LS sämtliche zusätzlichen Bremsmittel hinzukalkuliert werden um ein ähnliches Niveau“ an Bremskurven wie im System ZUB zu erhalten. Im Gegensatz zur pneumatischen Bremse würden diese weiteren Bremsmittel im Rahmen der täglichen Zugkontrolle jedoch nicht geprüft.[97]
Im Betrieb mit ETCS Level 1 Limited Supervision (Baseline 3) wurden in der Schweiz ab Anfang 2020 Fahrzeitverlängerungen gegenüber dem bisherigen ZUB-System beobachtet. Während im ZUB-Betrieb beispielsweise bei einem kurz vor Erreichen von „Halt“ auf „Fahrt“ wechselnden Hauptsignal eine „Befreiung“ und Weiterfahrt mit 40 km/h möglich war, sind im Betrieb mit ETCS (soweit keine Euroloop vorhanden ist) nur noch 15 km/h zulässig, bis Balisen am Hauptsignal die Begrenzung auflösen. Bei Stumpfgleisen wird die Annäherung an den Prellbock ab einem für den Lokführer nicht transparenten Punkt auf 15 km/h ohne weitere Toleranz überwacht. Während die SBB von Zeitverlusten „von ungefähr 20 Sekunden“ sprachen, sprachen Mitarbeiter von bis zu 30 Sekunden.[98][99] Auch die SBB beobachten Fahrzeitverlängerungen, da Lokführer konservativer unterwegs seien. Sie bremsten früher, um nicht vom System übersteuert zu werden.[100] Das Unternehmen arbeitet nach eigenen Angaben an Verbesserungen.[98] Die SBB machten eine entsprechende Direktbeauftragung an Siemens, im Wert von 13,3 Millionen Schweizer Franken, im März 2023 bekannt.[101] Die SBB erwarten, die Kapazitätseinbußen bis 2025 neutralisieren zu können. Der Präsident des Verbandes Schweizer Lokführer kritisiert die gegenüber früher reduzierten Einfahrgeschwindigkeiten in Bahnhöfe und fordert eine Alternative zu ETCS.[102]
Für ETCS signalgeführt wurden die Korrekturfaktoren der Strecke so gewählt, dass damit PZB-Bremskurven nachgebildet und Fahrzeit sowie Kapazität einer Strecke etwa jener der PZB entsprechen.[103] Die fahrzeugspezifische Schnellbremseinsatzkurve „soll möglichst nah (unterhalb) der PZB-Überwachungskurve verlaufen“.[104] Es besteht eine entsprechende Anforderung für den Netzzugang.[105]
ETCS-Einstiege sollten in Bereichen, in denen regelmäßig eine Bremsung erfolgt (beispielsweise Knoten), vermieden werden, um aufgrund unterschiedlicher Bremskurven der beiden beteiligten Zugbeeinflussungssysteme Zwangsbremsungen zu vermeiden.[106][107] Insbesondere in Knoten kann der Mindestabstand zwischen Einstiegs- und Folgesignal nicht immer gewährleistet werden, wodurch es zu ungewollten Bremskurvensprüngen kommen kann.[108] An Ländergrenzen kann es, beispielsweise durch Level- und Mode-Wechsel oder veränderte Nationale Werte, zu Bremskurvensprüngen kommen.[109][110] Ein Bremskurvensprung kann auch beim ETCS-Einstieg auftreten, wenn die ETCS-Bremskurve flacher ist als jene der konventionellen Zugbeeinflussung und das Folgesignal „Halt“ zeigt.
Vor Punkten, an denen Geschwindigkeiten reduziert werden müssen, kann es zu „Stau“-Effekten, d. h. längeren Zugfolgezeiten kommen. Die Länge der Bremsdistanz leitet sich im Bereich der Geschwindigkeitsschwelle dabei von der höheren, ursprünglichen Geschwindigkeit ab. Um aber diese Bremsdistanz auch tatsächlich abzufahren, benötigt der Zug aufgrund des Abbremsens auf die niedrigere Geschwindigkeit jedoch deutlich mehr Zeit, als wenn er mit konstanter (höherer) Geschwindigkeit weitergefahren wäre. Je größer die Geschwindigkeitsreduktion, desto größer die Belegung. Um den Effekt zu kompensieren, können Zugfolgeabschnitte verkürzt werden.[111]
Bei der Nutzung des Gamma-Modells können Optimierungen im Bremssystem zu kürzeren Zugfolgezeiten führen, beispielsweise durch eine optimierte Ansteuerung der Bremse, mit der die Versagenswahrscheinlichkeit der Bremsen an einem einzelnen Wagen oder Drehgestell vermindert wird.[30]
Eine Untersuchung zur Einführung von ETCS bei der S-Bahn Stuttgart empfiehlt für die ETCS-Ausrüstung der Triebfahrzeuge nach SRS 3.6.0 (damit ohne Pre-Indication-Bremskurve), ein Gamma-Bremsmodell sowie Automatisierten Fahrbetrieb (ATO), um eine möglichst große Leistungsfähigkeit zu erreichen. Bereits mit dem Conversion Model muss der Bremseinsatz aus 60 km/h 14 s später als unter konventioneller Ks-Signalisierung erfolgen (Beginn der Annäherungsfahrzeit 29 s statt 43 s vor dem Ende der Fahrterlaubnis). Durch Training und Erfahrung von Triebfahrzeugführern sowie Nutzung von ATO kann der Bremseinsatz zusätzlich verzögert und die Leistungsfähigkeit damit weiter gesteigert werden. Gleichwohl führen flache Bremskurven bei einem „Halt“ zeigenden Signal am Bahnsteigende zur Empfehlung, in kurzem Abstand von bis zu 100 m hinter dem „Ausfahrsignal“ ein zusätzliches Blockkennzeichen anzuordnen.[112] In der ETCS-Untersuchung wurden ETCS-Bremskurven konservativ mit dem Bremshundertstelmodell modelliert, da noch nicht alle notwendigen Daten für das Gammamodell vollumfänglich zur Verfügung standen.[32] Anfang 2020 wurde das Potential optimierter ETCS-Bremskurven für die Mindestzugfolgezeit auf der S-Bahn-Stammstrecke mit etwa zehn Sekunden beziffert.[113] Daneben werden aufgrund späterer Bremseinsatzpunkte etwas kürzere Fahrzeiten erwartet.[33] Darüber hinaus können bei Neufahrzeugen besser wirkende Bremsen zu noch späteren Bremseinsatzpunkten führen.[32] Laut einem 2022 zum DKS veröffentlichten Vergleich zweier in Länge und Fahrdynamik ähnlicher Züge könne deren Kapazitätsverbrauch u. a. aufgrund von Bremskurven und weiteren „digitalen“ Optimierungen um den Faktor 2 auseinandergehen.[114]
Bei einer Untersuchung zur Einführung von ETCS auf der Stammstrecke Wien kam es durch restriktive ETCS-Bremskurven zu einer Verlängerung der Zugfolgezeiten gegenüber konventioneller Leit- und Sicherungstechnik.[115]
Die Guidance Curve mindert den Verschleiß der Bremse, führt jedoch zu längeren Reisezeiten und einer verminderten Leistungsfähigkeit der Infrastruktur.[16] Laut einem zum DKS veröffentlichten Extrembeispiel (Guidance Curve von 0,5 m/s² in 25 Promille Gefälle) kann der anzusetzende Betriebsbremsweg damit mehr als doppelt so groß wie im konventionellen Betrieb werden und zu einem „deutlich“ größeren Kapazitätsverbrauch führen.[114]
Im Vergleich zu den Bremskurven der Linienzugbeeinflussung sieht eine 2019 vorgelegte Diplomarbeit für ETCS Level 2 (mit Lambda-Bremsmodell) im Allgemeinen etwas flachere Bremskurven. ETCS-Bremskurven seien im oberen Geschwindigkeitsbereich etwas weniger restriktiv, im Geschwindigkeitsbereich unter ca. 60 km/h sei die ETCS-Sollkurve dagegen flacher. Die bei LZB-Bremskurven unterstellte konstante Verzögerung über den gesamten Geschwindigkeitsbereich werde durch die abnehmende Bremsleistung bei höheren Geschwindigkeiten limitiert. Der Ort der Bremsankündigung erfolge in ETCS Level 2 in der Regel deutlich später als mit LZB.[116]
Für ETCS Level 2 werden bei Reisezügen mit 160 km/h und mehr typischerweise längere Mindestzugfolgezeiten als mit konventioneller Leit- und Sicherungstechnik erwartet. Dem kann mit einer geänderten Blockteilung und ATO entgegengewirkt werden. Bei Geschwindigkeiten darunter erwartet man dagegen auch ohne Änderung der Blockteilung kürzere Zugfolgezeiten.[73][117]
Im Digitalen Knoten Stuttgart (DKS) werden dagegen, durch Optimierung, gegenüber der LZB eher steilere Bremskurven erwartet.[118] Zur Bremskurvenoptimierung wird die Nutzung von Gamma-Modellen, die Variation des Vertrauensniveaus (EBCL) nach Betriebsfällen sowie vorausschauendes Fahren nahe der Zwangsbremseinsatzkurve vorgeschlagen.[119][120] Zu den bis 2023 umgesetzten fahrzeugseitigen Optimierungen zählt eine Auswahl von Gamma- und Lambdamodell beim Aufstarten (in Abhängigkeit von Zuglänge und Bremshundertsteln), nach Zuglänge unterschiedene Kdry_rst-Faktoren in Schritten von maximal 0,01 sowie die präzise Modellierung rotierender Massen. Dazu kommen einige infrastrukturseitige Optimierungen, die mit konventioneller Leit- und Sicherungstechnik nicht möglich wären.[39] Neue Doppelstock-Regionaltriebzüge des Landes Baden-Württemberg müssen nach Lastenheft mit dem Gamma-Modell unter dem im Netz der Deutschen Bahn festgelegten EBCL von 7 eine Schnellbremsverzögerung von wenigstens 1,00 m/s² erreichen.[31] Nach späteren Angaben soll der Bremsweg aus 160 km/h unter diesen Bedingungen höchstens 1000 m betragen.[121] Damit sollen auch in ungünstigen Zugkonfigurationen zur PZB mindestens gleichwertige und in der Praxis eher größere Schnellbremsverzögerungen erreicht werden.[32] Für die begleitende Bundesförderung der ETCS-Fahrzeugausrüstung ist bei Triebzügen, „bei denen die Nutzung des Gamma-Bremsmodells ohne technische Modifikation des Bremssystems möglich ist“ ein Gamma-Bremsmodell in der Regel zu nutzen.[122] Die Blockteilung wurde, insbesondere unter den Randbedingungen der ETCS-Bremskurven, mikroskopisch optimiert.[123] Je nach Zuglänge führen Lambda- oder Gammamodell zu kürzeren Mindestzugfolgezeiten.[124][125] Vor allen Dingen bei kürzeren Zügen führt das Gamma-Modell zu teilweise deutlich längeren Zugfolgezeiten als das Lambda-Modell; dies ist auf die Einbeziehung von Verfügbarkeiten und daraus folgenden Effekten zurückzuführen.[125] Auch führt das Gammamodell eher in Steigungen zu kürzeren Zugfolgezeiten, das Lambdamodell im Gefälle.[126] Beim Aufstarten wird entweder das Gamma- oder das Lambda-Bremsmodell ausgewählt.[127] Daneben sollen Guidance Curves gebildet werden, damit Triebfahrzeugführer den sich aus der Bremskurvenberechnung ergebenden Kurven besser folgen können. Um Effekte in Längsneigungen zu kompensieren, sollen dabei gesonderte Korrekturfaktoren (Kn+, Kn-) genutzt werden.[128]
Durch Ausreizung der Möglichkeiten bei der Modellierung von Bremskurven (unter Beachtung der jeweiligen Sicherheitsanforderungen) von Triebfahrzeugen können, bei häufig vorkommenden Baureihen und fortschreitender ETCS-Ausrüstung Skaleneffekte ohne zusätzliche Kosten auftreten.[129][130] Im Zuge einer möglichst einfachen ETCS-Fahrzeugausrüstung – beispielsweise für Kleinserien oder historische Fahrzeuge – wird hingegen mitunter auch ein vorkonfiguriertes, fahrzeugunabhängiges Bremsmodell angeboten. Dies kann zu einer restriktiveren Überwachung als technisch notwendig führen.[131]
Eine 2023 vorgelegte Studie erwartet durch Fahren näher an der Schnellbremseinsatzkurve mögliche Kapazitätssteigerungen (in Form zusätzlich potenziell vermarktbarer Fahrplantrassen) von wenigen Prozent sowie weiterführende Spielräume zur Verbesserung der Betriebsqualität. Ein weiterführendes Potenzial liegt demnach auch in fahrdynamisch optimierten Neufahrzeugen.[132][128]
Literatur
- Olivera Pavlovic: Bremsbetrieb auf ETCS-Strecken. In: Dieter Jaenichen (Hrsg.): Handbuch Bremsentechnik von Eisenbahnfahrzeugen. 1. Auflage. GRT Global Rail Academy and Media GmbH, 2023, ISBN 978-3-96245-259-9, S. 266–283.
- Michael Dieter Kunze: Überwachungsfunktionen. In: Jochen Trinckauf, Ulrich Maschek, Richard Kahl, Claudia Krahl (Hrsg.): ETCS in Deutschland. 1. Auflage. Eurailpress, Hamburg 2020, ISBN 978-3-96245-219-3, S. 125–147.
Weblinks
- European Rail Traffic Management System (ERTMS) mit Links zur Spezifikation und dem Bremskurvensimulationswerkzeug auf dem Internetauftritt der Europäischen Eisenbahnagentur (ERA)
- ETCS Tool. Alternatives Werkzeug zur Berechnung von ETCS-Bremskurven.
- Nationale Werte im ETCS - Teil 2. Video-Erläuterung der ETCS-Bremskurven und ihrer Zusammenhänge anhand der zu Grunde liegenden nationalen Werte.
- ETCS für Hobbyisten: Levelwechsel zwischen PZB und Level 2. Simulation eines Bremskurvensprungs beim ETCS-Einstieg.
Einzelnachweise
- Olivera Pavlovic, Olaf Gröpler: ETCS-Bremskurven – Bestimmung von Sicherheitsmargen für HGV-Triebzüge mit der Monte-Carlo-Methode. In: Tagungsband 14. Internationale Schienenfahrzeugtagung (= Dresden Rad Schiene). Band 14. Tetzlaff-Verlag, Dresden 2015, ISBN 978-3-87154-547-4, S. 93–95.
- Peter Eichenberger, Olaf Gröpler: ETCS-Bremskurven in Europa (= ZEVRail Tagungsband SFT Graz. Band 129). 2005, ISSN 1618-8330, ZDB-ID 2072587-5, S. 266–274.
- Dieter Jaenichen: Bremskurven-Berechnung der Schnellbremsung von Güterzügen für ETCS. In: Der Eisenbahningenieur. Band 65, Nr. 6, 2016, S. 17–22.
- Internationaler Eisenbahnverband (Hrsg.): UIC-Kodex 544-1. Bremse - Bremsleistung. 6. Auflage. Paris 2014, ISBN 978-2-7461-2298-7, S. 20 ff. 42, 66 ff.
- Peter Eichenberger: Kapazitätssteigerung durch ETCS. In: Signal + Draht. Band 99, Nr. 3, 2007, S. 6–14.
- Gregor Theeg, Béla Vincze: Vergleich europäischer Zugbeeinflussungssysteme. In: Signal + Draht. Band 99, Nr. 7+8, 2007, ISSN 0037-4997, S. 6–12.
- Je nach sogenanntem Set of specifications ist eine andere Version erforderlich. Für das Set of specifications 2 ist es die Version 3.4.0, für das Set of specifications 3 3.6.0 und für das Set of specifications 4 4.0.0.
- Patrick Zoetardt: Performance and quality of service. In: Peter Stanley (Hrsg.): ETCS for engineers. 1. Auflage. Eurailpress, Hamburg 2011, ISBN 978-3-7771-0416-4, S. 136–141.
- Olaf Gröpler: Bremswege und Bremswegsicherheit bei ETCS. In: ZEVrail. Band 132, Nr. 1-2, Januar 2008, ISSN 1618-8330, S. 31–39 (Der Aufsatz ist laut Text eine überarbeitete Fassung eines im November 2006 gehaltenen Vortrags. Er stellt damit offenbar den Stand von Ende 2006 dar.).
- ETCS-Spezifikation, Subset 026, Abschnitt 3.6.8.1
- Ulla Metzger, Henri Klos: Der Train Control Simulator (TCSim) der DB Systemtechnik. In: Der Eisenbahningenieur. Band 61, Nr. 8, 2010, S. 44–48.
- ETCS-Spezifikation, Subset 026, Version 3.6.0, A.3.2
- ETCS-Spezifikation, Subset 026, Version 3.6.0, 3.13.2.3.7.1
- Richard Kahl: ETCS Level 2. In: Jochen Trinckauf, Ulrich Maschek, Richard Kahl, Claudia Krahl (Hrsg.): ETCS in Deutschland. 1. Auflage. Eurailpress, Hamburg 2020, ISBN 978-3-96245-219-3, S. 204.
- ETCS-Spezifikation, Subset 026, Version 3.6.0, 3.13.8.5
- Thomas Richert, Nicolas Anne: Évaluation des gains en capacité et en robustesse. In: Revue générale des chemins de fer. Nr. 294, Juni 2019, ZDB-ID 2042624-0, S. 15–23.
- Martin Büttner, Mahir Celik, Michael Kümmling, Jan Lübs, Patrick Seeger, Marc-André Testa, Markus Vens, Stefan Wallberg: Digitalisierung der S-Bahn-Stammstrecke Stuttgart (Teil 2). In: Signal + Draht. Band 115, Nr. 12, Dezember 2023, ISSN 0037-4997, S. 55–63 (PDF).
- ETCS-Spezifikation, Subset 026, Version 3.6.0, 3.13.2.3.7.3
- ETCS-Spezifikation, Subset 026, Version 3.6.0, 3.13.9.3.5.6
- Lars Fehlauer: Auswirkungen flacher ETCS Bremskurven auf zeitabhängige Streckenausrüstungen. Technische Universität Dresden, Februar 2019, S. 1 f., 10, 40 f., 51, abgerufen am 22. April 2019.
- David Morton, Maik Bähr, Rolf Detering, Gregor Theeg: Optimierung der Zugfolgezeiten mittels ETCS und ATO. In: Signal + Draht. Band 104, Nr. 10, 2012, S. 16–19.
- ERA, UNISIG, EEIG ERTMS USERS GROUP (Hrsg.): ATO over ETCS. System Requirements Specification. 4. Mai 2018, S. 24 ff. (Abschnitt 7.1.3) (Datei SUBSET-125-010.docx in ZIP-Archiv [abgerufen am 25. April 2019]).
- ETCS-Spezifikation, Subset 026, Version 3.6.0, Abschnitt 3.13.2.3.1.1.
- ETCS-Spezifikation, Subset 026, Version 3.6.0, Abbildung 28
- ETCS-Spezifikation, Subset 026, Version 3.6.0, 3.13.4.3.2
- ETCS-Spezifikation, Subset 026, Version 3.6.0, 3.13.10.1
- ETCS-Spezifikation, Subset 026, Version 3.6.0, 3.13.10.3.9
- ETCS-Spezifikation, Subset 026, Version 3.6.0, 3.13.10.4.2
- ETCS-Spezifikation, Subset 026, Version 3.6.0, Abschnitt 3.13.1.3 / Abbildung 28.
- Stephan Horn, Olivéra Pavlovic: Chancen und Möglichkeiten der Monte-Carlo-Methode bei der Bestimmung der ETCS-Bremskurven. In: Eisenbahntechnische Rundschau. Nr. 9, September 2017, ISSN 0013-2845, S. 50–55.
- Marko Nicklich: Fahrzeuglieferungsvertrag. (PDF) Anlage 1: Fahrzeuglastenheft. 16. September 2020, S. 21, archiviert vom am 16. September 2020; abgerufen am 16. September 2020 („Entwurf“; Anforderungen 33091.Dosto_PZB.AA.38, .40A, .41, .42, .240, .241).
- René Neuhäuser, Peter Reinhart, René Richter, Thomas Vogel: Digitaler Knoten Stuttgart: Digitalisierung ist kein Selbstzweck. In: Deine Bahn. Nr. 3, März 2021, ISSN 0948-7263, S. 22–27 (PDF).
- Frank Dietrich, Marco Meyer, Rene Neuhäuser, Florian Rohr, Thomas Vogel, Norman Wenkel: Fahrzeugnachrüstung für den Digitalen Knoten Stuttgart. In: Der Eisenbahningenieur. Band 72, Nr. 9, September 2021, ISSN 0013-2810, S. 39–45 (PDF).
- Der Weg zur Interoperabilität: ETCS und Zugbremsung. In: Europäische Kommission (Hrsg.): Signal. Nr. 11, April 2009, S. 2 f. (europa.eu [PDF; abgerufen am 18. Dezember 2018]).
- Peter Winter: Compendium on ERTMS. 1. Auflage. Eurailpress, 2009, ISBN 978-3-7771-0396-9, S. 139 f., 211–223, 236.
- ETCS-Spezifikation, SUBSET 026-3, A.3.8.1
- ETCS-Spezifikation, Subset 026, Version 3.6.0, 3.13.6.2.1.4
- ETCS-Spezifikation, Subset 026, Version 3.6.0, 3.13.6.2.1.7
- Jonas Förster, Michael Kümmling, Martin Olesch, Peter Reinhart, Kristof Vandoorne, Thomas Vogel: ETCS-Bremskurven im Spiegel der Praxis. In: Der Eisenbahningenieur. Band 74, Nr. 6, Juni 2023, ISSN 0013-2810, S. 45–50 (PDF).
- Ernst Hohmann: Erweiterung der Monte Carlo Analyse um Bremssystemregelkreise zur Verbesserung von Bremskurven. In: ZEVrail, Glasers Annalen. Band 146, Nr. 11-12, November 2022, ISSN 1618-8330, ZDB-ID 2072587-5, S. 470–473.
- Nationale Eisen. (PDF) ETCS Full Supervision remcurves op het conventionele netwerk. In: infrabel.be. Infrabel, 26. März 2018, S. 12, abgerufen am 7. Oktober 2020 (niederländisch).
- Nationale Eisen en Waarden. (PDF) ETCS Full Supervision remcurves op het conventionele network. In: infrabel.be. Infrabel, 18. November 2016, S. 9, archiviert vom (nicht mehr online verfügbar) am 1. Februar 2019; abgerufen am 1. Dezember 2018 (niederländisch). Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- Philipp Pinter: Übersicht der nationalen Werte für ETCS auf den Strecken der DB Netz AG. (PDF) In: fahrweg.dbnetze.com. DB Netz, 27. Januar 2022, abgerufen am 4. Februar 2022.
- Suomen kansalliset ERTMS/ETCS-parametrit (= Liikenneviraston ohjeita. Nr. 20). 2015, ISBN 978-952-317-128-2, ISSN 1798-6648, S. 26 (PDF [abgerufen am 1. Dezember 2018]).
- André Feltz, Nils Nießen, Tobias Walke, Jürgen Jacobs: Analyse und Optimierung von ETCS-Parametern im Luxemburger Eisenbahnnetz. In: Signal + Draht. Band 109, Nr. 3, März 2017, ISSN 0037-4997, S. 6–17 (rwth-aachen.de [PDF]).
- Clarification on ETCS requirements sent from the trackside. (PDF) Technical Note – TN 029:2018. In: transport.nsw.gov.au. Transport Asset Standards Authority, 3. Oktober 2018, S. 43 f., abgerufen am 3. Oktober 2018 (englisch).
- Technical Note – TN 015: 2020. (PDF) In: nsw.gov.au. Transport Asset Standards Authority, 18. August 2020, S. 33 (38 im PDF), abgerufen am 8. Januar 2021 (englisch).
- Signal/Prosjektering/ETCS. In: banenor.no. Bane NOR, 11. Januar 2018, abgerufen am 1. Dezember 2018 (norwegisch).
- aktualizacji Listy Prezesa Urzędu Transportu Kolejowego. (PDF) In: utk.gov.pl. PKP POLSKIE LINIE KOLEJOWE S.A., 30. Oktober 2018, S. 2, abgerufen am 7. Januar 2021 (polnisch).
- Projektierungsgrundlagen für „National Values“ in der Schweiz. (PDF) Geschäftseinheit SAZ, Systemführerschaft ETCS CH, 16. März 2016, S. 4, 30, 46, 56, 63, abgerufen am 24. November 2018.
- List of National / Default Data / Seznam nárdoních /defaultních hodnot. (PDF) In: smlouvy.gov.cz. Abgerufen am 1. Dezember 2018 (tschechisch).
- Joost M. Jansen: ERTMS/ETCS Hybrid Level 3. (PDF) a simulation-based impact assessment for the Dutch railway network. In: repository.tudelft.nl. 10. Mai 2019, S. 25, abgerufen am 8. September 2019 (englisch).
- M. Jost: GAMMAMODELLE BR423. (PDF) In: digitale-schiene-deutschland.de. Alstom, 13. Februar 2023, S. 6–8, abgerufen am 6. April 2023 (englisch).
- M. Jost: GAMMAMODELLE BR430. (PDF) In: digitale-schiene-deutschland.de. Alstom, 13. Februar 2023, S. 6–8, abgerufen am 6. April 2023 (englisch).
- M. Jost: GAMMA-MODELLE TALENT. (PDF) In: digitale-schiene-deutschland.de. 13. Februar 2023, S. 5–13, abgerufen am 6. April 2023 (englisch).
- Peter Reinhart: Chancen und Knackpunkte der „Digitalisierung“: eine Zwischenbilanz aus dem Digitalen Knoten Stuttgart. (PDF) In: tu-dresden.de. Deutsche Bahn, 3. November 2022, S. 35, abgerufen am 5. November 2022.
- Olga Frank, Frank Minde, Ernst Hohmann, Olaf Gröpler: ATO und Kraftschluss: Berücksichtigung extrem niedriger Kraftschlüsse (xnH) bei ATO. In: ZEVrail, Glasers Annalen, Tagungsband SFT Graz 2022. Band 146, 2022, ISSN 1618-8330, ZDB-ID 2072587-5, S. 80–89.
- Emilia Koper, Andrzej Kochan, Łukasz Gruba: Simulation of the Effect of Selected National Values on the Braking Curves of an ETCS Vehicle. In: Development of Transport by Telematics. 19th International Conferenceon Transport System Telematics, TST 2019, Jaworze, Poland, February 27 – March 2, 2019, Selected Papers. Nr. 1049. Springer, 2019, ISBN 978-3-03027546-4, ISSN 1865-0929, S. 17–31, doi:10.1007/978-3-030-27547-1.
- European Rail Research Institute (Hrsg.): Bremsbewertung von Hochgeschwindigkeitszügen (vmax > 200 km/h) durch Verzögerungen (= Fragen des Bremswesens). Utrecht September 1994 (Bericht Nr. ERRI B 126/RP 16).
- European Rail Research Institute (Hrsg.): System Requirements Specification Version 3.01. 3rd official version - August 1996. August 1996, 4.5, S. 4–58–4–94.
- Peter Schmid: 34. Tagung „Moderne Schienenfahrzeuge“ in Graz. In: Eisenbahn-Revue International. Nr. 12, Dezember 2002, ISSN 1421-2811, S. 558–560.
- Andreas Singer, Gerhard Voß: Bremskurven für den Hochgeschwindigkeitsverkehr mit Funkzugbeeinflussung. In: ZEVrail. Band 123, Nr. 2, Februar 1999, ISSN 1618-8330, S. 53–60.
- Andreas Singer: Entwicklung und Erprobung von Bremskurven für den Hochgeschwindigkeitsverkehr mit Funkzugbeeinflussung (FZB). In: Tagungsband 3. Schienenfahrzeugtagung (= Dresden Rad Schiene). Band 3. Tetzlaff-Verlag, Dresden 1999, S. 34–36.
- Manfred Frank: Erweiterung des LZB-Systems für die Strecke Köln–Rhein/Main. In: Signal + Draht. Band 95, Nr. 10, 2003, ISSN 0037-4997, S. 31–33.
- D. Jaenichen, R. Jaensch: Neue LZB/FZB für Neubaustrecke Köln-Frankfurt/Main. Dresden April 1997, S. 31.
- Werner Geier: Lokomotiven der BR 189 für die Betuweroute. In: Eisenbahn-Revue International. Nr. 4, 2008, ISSN 1421-2811, S. 170–174.
- Frank Walenberg, Rob te Pas, Lieuwe Zigterman: Making progresses towards standardised train control. In: Railway Gazette International. Band 168, Nr. 3, 2012, S. 35–38.
- Olaf Gröpler, Olivera Pavlovic: ETCS-Bremskurven: Bestimmung der Sicherheitsmargen für HGV-Triebzüge mit Hilfe der Monte-Carlo-Simulation. Foliensatz zu einem Vortrag auf der 14. Internationalen Schienenfahrzeugtagung in Dresden, 23. bis 25. September 2015. Hrsg.: DB Systemtechnik, Siemens. September 2015, S. 20, 23, 32.
- Peter Schmied: 36. Tagung „Moderne Schienenfahrzeuge“. In: Eisenbahn-Revue International. Heft 2/2006, S. 78–79.
- Role of ERTMSFormalSpecs in Change Request 1249 resolution with EUG. In: ertmssolutions.com. 15. Juni 2016, archiviert vom (nicht mehr online verfügbar) am 5. Dezember 2018; abgerufen am 5. Dezember 2018 (englisch). Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- ETCS-Spezifikation, Subset 026, Abschnitt 3.13.9.5 im Vergleich von Version 3.4.0 und 3.6.0
- Siehe Safety Requirements for the Technical Interoperability of ETCS in Levels 1 & 2 (Subset 091), S. 5.
- Michael Kümmling, Sven Wanstrath: Maximierung der Fahrwegkapazität mit Digitaler Leit- und Sicherungstechnik. In: Eisenbahntechnische Rundschau. Nr. 7+8, August 2021, ISSN 0013-2845, S. 16–21 (PDF).
- Internationaler Eisenbahnverband (Hrsg.): Bremsen - Entlüftungsleistung der ETCS-Schnellbremsventile für Lambda-Züge. International Railway Solution, IRS 50544-3. 1. Auflage. Paris 2020, ISBN 978-2-7461-2795-1, S. 3, 9.
- Andreas Assfalg: Systemtechnik Leistungsbericht 2021/2022. (PDF) In: db-systemtechnik.de. DB Systemtechnik, September 2022, S. 39, abgerufen am 1. November 2022.
- DIN EN 17997-1:2023-10 - Entwurf. In: beuth.de. Abgerufen am 25. Oktober 2023.
- Michel Van Liefferinge, Jean-Baptiste Simonnet, Henri Van Houten, Michel Ruesen, Wouter Malfait, Pio Guido, Josef Doppelbauer: ERTMS Longer Term Perspective. (PDF) European Railway Agency, 18. Dezember 2015, S. 6, 12 f., archiviert vom am 3. September 2022; abgerufen am 26. Mai 2019 (englisch).
- Eisenbahnausbauprogramme. (PDF) Standbericht 2019. In: admin.ch. Bundesamt für Verkehr, S. 89 f., abgerufen am 17. Mai 2020.
- Peter Reinhart: ETCS & Co für „maximale Leistungsfähigkeit“. (PDF) Ein Werkstattbericht zum Digitalen Knoten Stuttgart. DB Projekt Stuttgart–Ulm GmbH, 21. November 2019, S. 51 f., archiviert vom am 21. November 2019; abgerufen am 22. November 2019.
- Martin Mock: Neues Rollmaterial SOB. In: Verband Schweizer Lokomotivführer und Anwärter (Hrsg.): Loco-Folio. Nr. 192, 2019, ZDB-ID 2303252-2, S. 41–43 (PDF im Web Archive).
- Jakub Marek, Ivo Myslivec, Bohumil Drápal: Modell der ETCS-Bremskurven: Verbesserungsvorschlag für bereits bremsende Züge. In: Signal + Draht. Band 116, Nr. 3, 2020, ISSN 0037-4997, S. 36–46.
- Marc Ehret: Virtual Train Brakes. (PDF) Abstände verkürzen - trotz Corona. In: ews.tu-berlin.de. Deutsches Zentrum für Luft- und Raumfahrt, Knorr-Bremse, 11. Mai 2020, S. 46, abgerufen am 18. Juni 2020.
- ETCS: Parameter für ETCS-Gamma-Bremsmodell und Guidance-Curve voraussichtlich ab dem Fahrplan 2026 notwendig. In: dbinfrago.com. DB InfraGO, 4. April 2024, abgerufen am 9. April 2024.
- Peter Reinhart, Daniel Scherrer: Summary Workshop 5 Maximum performance through ETCS. (PDF) In: era.europa.eu. Deutsche Bahn, Schweizer Bundesbahnen, 28. April 2022, S. 2, 3, abgerufen am 21. Januar 2023 (englisch).
- André Schweizer, Christian Schlatter, Urs Guggisberg, Ruedi Hösli: Zugbeeinflussungskonzept sowie Umsetzung der Migration zu ETCS L1 LS bei den normalspurigen Privatbahnen BLS und SOB. In: Schweizer Eisenbahn-Revue. Nr. 3, März 2015, ISSN 1022-7113, S. 146–149.
- Peter Schmid: Zugbeeinflussung bei den ÖBB. In: Eisenbahn-Revue International. Nr. 4, 2000, ISSN 1421-2811, S. 168 f.
- Patrick Castan: Evolution of Signalling Systems and Implementation of ETCS on New High Speed Lines. In: Signal + Draht. Band 98, Nr. 12, 2006, ISSN 0037-4997, S. 44–47.
- ETCS-Tagung in Berlin. In: Eisenbahn-Revue International. Nr. 2, 2008, ISSN 1421-2811, S. 72 f.
- Jens Hartmann, Sascha Hardel: Erhöhung der Streckenleistungsfähigkeit durch, mit oder trotz ETCS Level 2? (PDF) In: ews.tu-berlin.de. DB Netz, 23. Mai 2022, S. 27 f., archiviert vom (nicht mehr online verfügbar) am 5. Juni 2022; abgerufen am 30. Mai 2022.
- Marc Behrens, Mirko Caspar, Andreas Distler, Nikolaus Fries, Sascha Hardel, Jan Kreßner, Ka-Yan Lau, Rolf Pensold: Schnelle Leit- und Sicherungstechnik für mehr Fahrwegkapazität. In: Der Eisenbahningenieur. Band 72, Nr. 6, Juni 2021, ISSN 0013-2810, S. 50–55 (PDF).
- Lars Fehlauer, Richard Kahl: Verhinderung betrieblicher Einschränkungen durch ETCS-Bremskurven an Bahnübergängen. In: Der Eisenbahningenieur. Band 71, Nr. 8, August 2020, ISSN 0013-2810, S. 34–37 (PDF).
- Markus Leutwyler: Interview mit Dr. Peter Füglistaler. In: Locofolio. Nr. 1, 2017, ZDB-ID 2303252-2, S. 17–19 (archive.org [PDF]).
- Deutschland: ETCS und Digitale Stellwerke als Heilsbringer. In: Eisenbahn-Revue International. Nr. 11, November 2019, ISSN 1421-2811, S. 565.
- SBB-Strecke Sion – Sierre auf ETCS Level 2 umgestellt. In: Eisenbahn-Revue International. Nr. 12, Dezember 2018, ISSN 1421-2811, S. 623–625.
- Neuer ETCS-Abschnitt im Tessin in Betrieb. In: Eisenbahn-Revue International. Nr. 7, Juli 2018, ISSN 1421-2811, S. 354.
- Stephan Gut: ETCS und ATO. In: LocoFolio. Nr. 1, 2019, ZDB-ID 2303252-2, S. 11 (PDF-Datei).
- Hubert Giger, Raoul Fassbind: ETCS/ERTMS-Dossier. (PDF) In: vslf.com. Verband Schweizer Lokomotivführer und Anwärter, 16. März 2024, S. 8, abgerufen am 20. März 2024.
- Schweiz: ETCS bringt Fahrzeitverlängerungen. In: Eisenbahn-Revue International. Nr. 2, Februar 2020, ISSN 1421-2811, S. 100.
- Wie weiter mit ETCS und ATO. In: vslf.com. Verband Schweizer Lokomotivführer und Anwärter, 20. Februar 2020, archiviert vom am 25. Januar 2021; abgerufen am 9. Oktober 2020.
- Stefan Ehrbar: Mit mehr Stopps wollen die SBB die Züge pünktlicher machen. In: Luzerner Zeitung. 13. November 2021, S. 12.
- Optimierung ETCS L1LS. Meldung 1327831. In: simap.ch. 31. März 2023, abgerufen am 2. Mai 2023 (deutsch): „Gegenstand und Umfang des Auftrags: Nach flächendeckender Einführung der Zugüberwachung mit ETCS L1/LS und vermehrtem Einsatz von Fahrzeugen, welche diesen Zugsüberwachungsmodus nutzten, stellte man betriebliche Hemmnisse gegenüber der Vorgängertechnologie (ZUB) fest. (…) Um die Fahrbarkeit und Fahrplanstabilität gewährleisten zu können, ist die Optimierung der Zugsüberwachungstechnologie ETCS L1/LS unumgänglich. Nun werden die aktuellen Vorgaben der Systemführerschaft ETCS flächendeckend auf den bestehenden Stellwerksanlagen umgesetzt, welche mittels SW-Update auf den Stellwerksanlagen erfolgen wird.“
- René Donzé: Die neue Zugsicherung führt zu Verspätungen. In: NZZ am Sonntag. 19. Februar 2023, S. 9.
- Niels Neuberg: Der Einsatz von ETCS Level 1 Limited Supervision bei der Deutschen Bahn AG. In: Signal + Draht. Band 106, Nr. 12, Dezember 2014, ISSN 0037-4997, S. 12–18.
- Gamma-Züge unter ETCS L1LS. (PDF) Bremsleistung. In: fahrweg.dbnetze.com. DB Netz AG, 20. Juni 2019, S. 4, 9, archiviert vom (nicht mehr online verfügbar) am 29. Juli 2019; abgerufen am 29. Juli 2019. Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- Philipp Pinter: NTR für ETCS Baseline 2 und 3. (PDF) In: fahrweg.dbnetze.com. DB Netz, 18. August 2020, S. 3, abgerufen am 4. Juni 2021.
- Uwe Dräger: ETCS und der Übergang zu den nationalen Zugsicherungssystemen der DB AG. In: Signal + Draht. Band 96, Nr. 11, 2004, ISSN 0037-4997, S. 6–15.
- Benedikt Wenzel, Sebastian Pechtold: Planung von ETCS – Neue Aspekte und Erfahrungen am Beispiel VDE 8. In: Der Eisenbahningenieur. Band 64, Nr. 3, März 2015, ISSN 0013-2810, S. 36–39.
- Helmut Steindl: Internationaler SIGNAL+DRAHT-Kongress 2014. In: Signal + Draht. Band 107, Nr. 1, Januar 2014, ISSN 0037-4997, S. 6–21.
- Lars Brune, Pascal Kahnert, Julia Kalkreiber, Bavo Lens: ETCS and Landesgrenzen: Interoperabilität und Ausrüstungsvarianten. In: Signal + Draht. Band 113, Nr. 7+8, August 2021, ISSN 0037-4997, S. 23–35 (PDF).
- Robert Schwenzer: Auswirkungen unterschiedlicher ETCS-Bremskurven an Landesgrenzen. (PDF) 14. Juni 2021, abgerufen am 30. September 2021.
- Peter Eichenberger, Bruno Spori: Optimierte Signalisierungskonzepte zur Kapazitätssteigerung mit ETCS Level 2. In: Signal + Draht. Band 105, Nr. 9, 2013, ISSN 0037-4997, S. 31–36.
- Untersuchung zur Einführung von ETCS im Kernnetz der S-Bahn Stuttgart. (PDF) Abschlussbericht. WSP Infrastructure Engineering, NEXTRAIL, quattron management consulting, VIA Consulting & Development GmbH, Railistics, 30. Januar 2019, S. 283–285, 306–308, 313, 355, abgerufen am 13. April 2019.
- Peter Reinhart: Der betrieblich-verkehrliche Nutzen des Projekts Stuttgart–Ulm. (PDF) Ein geraffter Überblick in Schlaglichtern. DB Projekt Stuttgart-Ulm, 27. Januar 2020, S. 54, abgerufen am 30. Januar 2020.
- Nicolas Bucht, Peter Reinhart, Thomas Vogel: Digitaler Knoten Stuttgart: Wechselwirkungen zwischen Fahrzeugausrüstung, Infrastruktur und Betrieb. (PDF) In: bahnprojekt-stuttgart-ulm.de. Deutsche Bahn, Ministerium für Verkehr Baden-Württemberg, 1. Dezember 2022, S. 14–16, abgerufen am 23. Dezember 2022.
- Maximilian Wirth, Andreas Schöbel: Mindestzugfolgezeiten bei ETCS Level 2 und Level 3 auf der Wiener S-Bahn-Stammstrecke. In: Signal + Draht. Band 112, Nr. 4, 2020, ISSN 0037-4997, S. 21–26.
- Lars Fehlauer, Richard Kahl: Einfluss der ETCS-Bremskurven auf die Infrastrukturplanung. In: Der Eisenbahningenieur. Band 69, Nr. 8, August 2019, ISSN 0013-2810, S. 34–37 (PDF).
- Michael Kümmling: Mehr Leistungsfähigkeit mit Digitaler LST – aber wie? (PDF) In: tu-dresden.de. DB Projekt Stuttgart–Ulm, 17. Dezember 2020, S. 18, abgerufen am 17. Dezember 2020.
- Marc Behrens, Enrico Eckhardt, Michael Kümmling, Markus Loef, Peter Otrzonsek, Martin Schleede, Max-Leonhard von Schaper, Sven Wanstrath: Auf dem Weg zum Digitalen Knoten Stuttgart: ein Überblick. In: Der Eisenbahningenieur. Band 71, Nr. 4, April 2020, ISSN 0013-2810, S. 14–18 (PDF).
- Hannes Goers, Peter Reinhart, Rüdiger Weiß: Knoten Stuttgart. (PDF) ETCS als Träger für Leistungs- und Qualitätssteigerungen. In: vm.baden-wuerttemberg.de. DB Netz, DB Projekt Stuttgart–Ulm, 9. Januar 2019, S. 22 f., 36, abgerufen am 24. April 2020.
- Leistungsfähigkeit mit ETCS & Co. im Spiegel der Praxis. (PDF) In: bahnprojekt-stuttgart-ulm.de. DB Netz, 10. Juli 2023, S. 28 f., abgerufen am 11. Juli 2023.
- So sehen die 130 neuen Doppelstockzüge fürs Land aus. In: vm.baden-wuerttemberg.de. Ministerium für Verkehr Baden-Württemberg, 25. Mai 2022, abgerufen am 25. Mai 2022.
- Gratza: Bekanntmachung der Richtlinie zur Förderung der Ausrüstung von Schienenfahrzeugen mit Komponenten des Europäischen Zugsicherungssystems ERTMS (European Rail Traffic Management System) und des automatisierten Bahnbetriebs (ATO) im Rahmen der infrastrukturseitigen Einführung von ERTMS im „Digitalen Knoten Stuttgart“. In: Bundesministerium der Justiz und für Verbraucherschutz (Hrsg.): Bundesanzeiger, amtlicher Teil. Bundesanzeiger Verlag, 5. Februar 2021, ISSN 0344-7634, S. 6 (PDF [abgerufen am 5. Februar 2021] Fundstelle BAnz AT 05.02.2021 B2).
- Jonas Denißen, Markus Flieger, Michael Kümmling, Michael Küpper, Sven Wanstrath: Optimierung der Blockteilung mit ETCS Level 2 im Digitalen Knoten Stuttgart. In: Signal + Draht. Band 113, Nr. 7+8, August 2021, ISSN 0037-4997, S. 60–67 (PDF).
- Eine Einführung in den Digitalen Knoten Stuttgart. (PDF) In: bahnprojekt-stuttgart-ulm.de. Deutsche Bahn, 12. April 2022, S. 29, abgerufen am 21. April 2022.
- Evaluierung der Förderrichtlinie des Bundesministeriums für Digitales und Verkehr zur Förderung der Ausrüstung von Schienenfahrzeugen mit Komponenten des europäischen Zugbeeinflussungssystems ERTMS (European Rail Traffic Management System) und des automatisierten Bahnbetriebs (ATO) im Rahmen der infrastrukturseitigen Einführung von ERTMS im „Digitalen Knoten Stuttgart“. In: digitale-schiene-deutschland. 4. April 2023, S. 140 (PDF), abgerufen am 14. April 2023: „Inzwischen wurden für drei der vier nachzurüstenden Fahrzeugtypen im DKS Gammamodelle gebildet. Im Vergleich zu den Lambda-Modellen zeigte sich, dass diese insbesondere im Hochleistungsbetrieb mit langen Zügen zu kürzeren Zugfolgen führen und fahrzeitverlängernde Effekte an Geschwindigkeitsschwellen nach unten vermeiden. Insbesondere bei kürzeren Zügen kommt es im Gammamodell, im Vergleich zum Lambdamodell, aufgrund von Verfügbarkeitseffekten zu (teils deutlich) verlängerten Zugfolgezeiten.“
- ETCS & Co. für maximale Leistungsfähigkeit: Eine Einführung in den Digitalen Knoten Stuttgart. (PDF) In: bahnprojekt-stuttgart-ulm.de. DB Netz, 20. April 2023, S. 24, abgerufen am 20. April 2023.
- ETCS & Co. für „maximale Leistungsfähigkeit“ (Brems-)Schlaglichter auf den Digitalen Knoten Stuttgart. (PDF) In: bahnprojekt-stuttgart-ulm.de. Deutsche Bahn, 24. Oktober 2022, S. 19, abgerufen am 29. Oktober 2022.
- Michael Kümmling, Sven Wanstrath: „Digitale“ Kapazitätssteigerungen: ein Sachstand. In: Eisenbahn-Ingenieur-Kompendium. 2024, ISSN 2511-9982, ZDB-ID 2878509-5, S. 239–266 (PDF).
- Thorsten Büker: Eisenbahn im Gesamtsystem denken – Digitalisierung eröffnet wesentliche Chancen. In: Signal + Draht. Band 112, Nr. 7+8, 2020, ISSN 0037-4997, S. 3 (PDF).
- Thorsten Büker: Deutschlandtakt und Digitalisierung – Mehr erreichen im Systemverbund. (PDF) In: eba.bund.de. quattron, VIA-CON, 29. September 2020, S. 6, abgerufen am 9. Oktober 2020.
- Heinrich Schulmeister, Christoph Rietmann: Siemens lanciert „SwissApp“ für ETCS. In: Schweizer Eisenbahn-Revue. Nr. 11, November 2021, ISSN 1022-7113, S. 595.
- Thorsten Büker, Simon Heller, Eike Hennig, Peter Reinhart, Frédéric Weymann: Zum verkehrlichen Nutzen der Digitalen Schiene Deutschland. In: Der Eisenbahningenieur. Band 75, Nr. 2, Februar 2024, ISSN 0013-2810, S. 47–52 (PDF).