Bézierkurve
Die Bézierkurve [] ist eine parametrisch modellierte Kurve, die ein wichtiges Werkzeug bei der Beschreibung von Freiformkurven und -flächen darstellt.

In der Computergrafik finden Bézierkurven wegen ihrer optischen Eleganz und der verhältnismäßig leichten mathematischen Handhabbarkeit häufig Anwendung. Sie werden zur Definition von Kurven und Flächen in Vektorgrafiken genutzt. Mögliche Anwendungsfälle finden sich z. B. im Computer Aided Design, bei der Erstellung von Illustrationen (siehe z. B. SVG) oder der Beschreibung von Schrifttypen (z. B. Postscript, Type1, TrueType und CFF-OpenType).
Die Bézierkurve wurde Anfang der 1960er Jahre unabhängig voneinander von Pierre Bézier bei Renault und Paul de Casteljau bei Citroën für Computer-Aided Design (computerunterstützte Konstruktion) entwickelt. Paul de Casteljau gelang zwar die Entdeckung früher, Citroën hielt seine Forschungen jedoch bis zum Ende der 1960er Jahre als Betriebsgeheimnis zurück.
Verallgemeinerungen des Konzepts der Bézierkurven führen zu den Bézierflächen.
Motivation, Definition
Numerisch einfache Kurven in der Ebene sind solche, die mit Hilfe einer Parameterdarstellung beschrieben werden, wobei und Polynome in sind. Ist




- ,


und setzt man , so lässt sich die Kurve übersichtlicher durch


beschreiben.
Im Allgemeinen lässt sich direkt aus den Koeffizienten-Punkten nur wenig über den Kurvenverlauf aussagen. Lediglich (Anfangspunkt der Kurve) und (Tangentialvektor der Kurve an ) haben konkrete geometrische Bedeutungen. Dies ändert sich, wenn man die Polynome nicht in der Monom-Basis , sondern in der folgenden Bernsteinbasis darstellt:







Es sei nun festgewählt und die Vektoren beschreiben ein ebenes oder räumliches Polygon. Dann heißt die Darstellung eine Bézierkurve[1][2] vom (maximalen) Grad . Die Punkte nennt man Kontrollpunkte der Bézierkurve.





Eigenschaften der Bernsteinpolynome:

- für für
- Das Bernsteinpolynom hat genau ein Maximum und zwar an der Stelle D. h. eine leichte Veränderung des Punktes hat nur in der Umgebung von eine wesentliche Veränderung der Kurve zur Folge.








Eigenschaften einer Bézierkurve:
- ist der Anfangs-, der Endpunkt
- ist die Richtung der Tangente im Punkt ist die Richtung der Tangente im Punkt
- Das Polygon gibt einen ungefähren Verlauf der Kurve an.





Weitere Eigenschaften der Bernsteinbasis
Für Untersuchungen von Bézierkurven sind die folgenden Eigenschaften[3] nützlich:
- Beziehung zwischen der Bernstein- und der Monom-Basis
- (MB)
- Rekursion
- (R)
- Skalierung
- (S)
- Ableitung
- (A)
- (Man beachte, dass ist.)
- Produkt
- (P)






Weitere Eigenschaften einer Bézierkurve
In der Literatur[4] werden noch weitere Eigenschaften einer Bézierkurve aufgelistet:
- Die Kurve liegt innerhalb der konvexen Hülle des Kontrollpolygons. Dies folgt daraus, dass die Bernsteinpolynome vom Grad eine Zerlegung der Eins sind:
![{\displaystyle 1=\sum _{i=0}^{n}B_{i}^{n}(t)\quad t\in [0,1]}](../I/04b7d3ff682eb0412bf1ebba28284ada72636bbf.svg)
- Die ersten Summanden des Taylorpolynoms bei bzw. bei lauten für :





- Eine Gerade schneidet eine Bézierkurve höchstens so oft, wie sie ihr Kontrollpolygon schneidet (die Kurve ist variationsreduzierend, bzw. hat eine beschränkte Schwankung).
- Eine affine Transformation (Verschiebung, Skalierung, Rotation, Scherung) kann auf die Bézierkurve durch Transformation des Kontrollpolygons angewendet werden („affine Invarianz“).
- Liegen alle Kontrollpunkte auf einer Geraden, so wird die Bézierkurve zu einer Strecke (Vorteil gegenüber der Polynominterpolation).
- Der Einfluss eines Kontrollpunktes auf die Kurve ist global. Das heißt: Verschiebt man einen Punkt, verändert sich die gesamte Kurve. Daher verwendet man in der Praxis meist Splines, zusammengesetzte Kurven festen Grades, die stetig ineinander übergehen.
- Eine Bézierkurve kann immer in zwei Bézierkurven gleicher Ordnung geteilt werden, wobei sich die neuen Kontrollpunkte aus den alten mit Hilfe des De-Casteljau-Algorithmus ergeben (s. Abschnitt Teilung einer Bézierkurve).
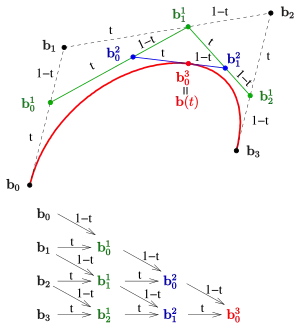
Der De-Casteljau-Algorithmus
Höhere Potenzen von auszurechnen ist numerisch instabil. Der folgende Algorithmus führt deshalb die Berechnung eines Kurvenpunktes auf wiederholte lineare Interpolation zurück. In jedem Schritt wird mittels linearer Interpolation ein neues um 1 kürzeres Polygon berechnet (s. Bild). Bei der letzten Interpolation entsteht schließlich der Kurvenpunkt:
Für das Polygon im (oder ) und einem definiert man rekursiv für jedes das Polygon





- erzeugt. Dabei sei .


Das Polygon der Stufe ist identisch mit dem Ausgangspolygon, das Polygon der Stufe ist ein Punkt, der Kurvenpunkt.


Aus der Rekursionseigenschaft (R) der Bernsteinpolynome folgt
- für


(Beweis mit Hilfe vollständiger Induktion über r.) Also ist

die Bézierkurve mit dem Kontrollpolygon . Diese Methode, einen Punkt der Bézierkurve durch lineare Interpolationen zu bestimmen, heißt De-Casteljau-Algorithmus.

Wie für ein mit Hilfe des Casteljau-Algorithmus aus dem Kontrollpolygon die Zwischenpolygone und schließlich der Punkt der Bézierkurve entsteht, zeigt die Abbildung für . Die neuen Punkte teilen immer die alten Strecken, auf denen sie liegen, im gleichen Verhältnis .


Bézierkurven bis zum dritten Grad
Lineare Bézierkurven :

Zwei Kontrollpunkte und bestimmen eine gerade Strecke zwischen diesen beiden Punkten. Der Verlauf dieser linearen Bézier„kurve“ wird beschrieben durch


![{\displaystyle {\bf {b}}(t)=\ (1-t){\bf {b_{0}}}+t{\bf {b}}_{1}{\mbox{ , }}\ t\in [0,1]}](../I/50973dcbbbd628be4cdccb045725ac64c7d9d0a2.svg)
Quadratische Bézierkurven :


Eine quadratische Bézierkurve ist der Pfad, der durch die Funktion für die Punkte , und beschrieben wird:


![{\displaystyle {\begin{aligned}{\bf {b}}(t)\ &=\ \sum _{i=0}^{2}{\binom {2}{i}}t^{i}(1-t)^{2-i}{\bf {b}}_{i}\\\ &=\ (1-t)^{2}{\bf {b}}_{0}+2t(1-t){\bf {b}}_{1}+t^{2}{\bf {b}}_{2}\\\ &=\ ({\bf {b}}_{0}-2{\bf {b}}_{1}+{\bf {b}}_{2})t^{2}+(-2{\bf {b}}_{0}+2{\bf {b}}_{1})t+{\bf {b}}_{0}{\mbox{ , }}\ t\in [0,1]\ .\end{aligned}}}](../I/81ef87b2368fd86807771b2b59a2cda38dec657e.svg)
Die letzte Zeile zeigt: Eine quadratische Bézierkurve ist eine Parabel.
Mit Hilfe des De-Casteljau-Algorithmus ausgedrückt:

![{\displaystyle {\bf {b}}_{0}^{2}(t)=(1-t)\underbrace {{\Bigl [}(1-t)\overbrace {{\bf {b}}_{0}} ^{{\bf {b}}_{0}^{0}}+t\overbrace {{\bf {b}}_{1}} ^{{\bf {b}}_{1}^{0}}{\Bigr ]}} _{{\bf {b}}_{0}^{1}(t)}+t\underbrace {{\Bigl [}(1-t)\overbrace {{\bf {b}}_{1}} ^{{\bf {b}}_{1}^{0}}+t\overbrace {{\bf {b}}_{2}} ^{{\bf {b}}_{2}^{0}}{\Bigr ]}} _{{\bf {b}}_{1}^{1}(t)}}](../I/1d4137d18e5a8238a2a64d3cc29ad7befb12c14e.svg)
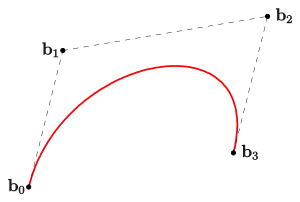
Kubische Bézierkurven :


Kubische Bézierkurven sind in der Praxis von großer Bedeutung, da sowohl B-Spline-Kurven als auch NURBS stückweise in kubische Bézierkurven umgewandelt werden, um dann effizient mit dem De-Casteljau-Algorithmus gezeichnet zu werden. Selbiges gilt für hermitesche Splines, die in ihrer kubischen Form vor allem in der Computeranimation zur Interpolation zwischen Keyframes verwendet werden.
![{\displaystyle {\begin{aligned}{\bf {b}}(t)\ &=\ \sum _{i=0}^{3}{\binom {3}{i}}t^{i}(1-t)^{3-i}{\bf {b}}_{i}\\&=\ (1-t)^{3}{\bf {b}}_{0}+3t(1-t)^{2}{\bf {b}}_{1}+3t^{2}(1-t){\bf {b}}_{2}+t^{3}{\bf {b}}_{3}\\&=\ (-{\bf {b}}_{0}+3{\bf {b}}_{1}-3{\bf {b}}_{2}+{\bf {b}}_{3})t^{3}+(3{\bf {b}}_{0}-6{\bf {b}}_{1}+3{\bf {b}}_{2})t^{2}+(-3{\bf {b}}_{0}+3{\bf {b}}_{1})t+{\bf {b}}_{0}\ ,\ t\in [0,1]\ .\end{aligned}}}](../I/08105a53761156b98a5aa9eb15786cc29066f831.svg)
Mit Hilfe des De-Casteljau-Algorithmus ausgedrückt:

![{\displaystyle {\begin{aligned}{\bf {b}}_{0}^{3}(t)=(1-t)&\underbrace {{\Bigl \{}(1-t)\overbrace {{\bigl [}(1-t){\bf {b}}_{0}+t{\bf {b}}_{1}{\bigr ]}} ^{{\bf {b}}_{0}^{1}(t)}+t\overbrace {{\bigl [}(1-t){\bf {b}}_{1}+t{\bf {b}}_{2}{\bigr ]}} ^{{\bf {b}}_{1}^{1}(t)}{\Bigr \}}} _{{\bf {b}}_{0}^{2}(t)}+\\t&\underbrace {{\Bigl \{}(1-t)\overbrace {{\bigl [}(1-t){\bf {b}}_{1}+t{\bf {b}}_{2}{\bigr ]}} ^{{\bf {b}}_{1}^{1}(t)}+t\overbrace {{\bigl [}(1-t){\bf {b}}_{2}+t{\bf {b}}_{3}{\bigr ]}} ^{{\bf {b}}_{2}^{1}(t)}{\Bigr \}}} _{{\bf {b}}_{1}^{2}(t)}\end{aligned}}}](../I/658946b14c57c352136b17ce80fde31f79b5373d.svg)
Vergleich der Kurvendarstellungen
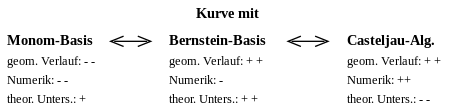
Polynomiale Kurven (d. h. die Koordinaten sind Polynome bzgl. ) lassen sich in der Monom-Basis, der Bernsteinbasis und mit Hilfe des De-Casteljau-Algorithmus (fortgesetzte lineare Interpolation) beschreiben. Da die Koeffizientenpunkte der Monom-Basis nicht viel über den Kurvenverlauf aussagen, entstanden die Darstellungen mit der Bernstein-Basis (Bézier-Kurven) und mit dem De-Casteljau-Algorithmus. Die letzten beiden haben allerdings auch Vor- und Nachteile. Der De-Casteljau-Algorithmus hat gegenüber der Bézierdarstellung bei der Berechnung der Punkte (Numerik) Vorteile. Bézierkurven lassen sich dafür durch die vielen formalen Eigenschaften (s. o.) der Bernstein-Polynome leichter theoretisch (z. B. Krümmung) untersuchen. Der numerische Nachteil der Bézier-Kurven (Auswertung der Bernstein-Polynome) lässt sich durch eine dem Horner-Schema ähnlichen Methode ausgleichen:[5]
function bezier_comp(degree: integer; coeff: r_array; t: real): real;
{Berechnet eine Komponente einer Bezier-Kurve. (Aus FARIN: Curves and Surfaces...)}
var
i, n_choose_i: integer; fact, t1, aux: real;
begin
t1 := 1 - t; fact := 1; n_choose_i := 1;
aux := coeff[0] * t1;
for i := 1 to degree - 1 do
begin
fact := fact * t;
n_choose_i := n_choose_i * (degree - i + 1) div i;
aux := (aux + fact * n_choose_i * coeff[i]) * t1;
end;
aux := aux + fact * t * coeff[degree];
bezier_comp := aux;
end; {bezier_comp}
Ableitungen einer Bézier-Kurve
Mit Hilfe der Ableitungen der Bernsteinpolynome ergibt sich für die 1. Ableitung der Bézierkurve :


Lässt man die Tangentenvektoren alle im Nullpunkt des Koordinatensystems beginnen, so beschreiben sie eine weitere Bézierkurve mit den Kontrollpunkten .

Speziell gilt:
- und


Um höhere Ableitungen übersichtlich schreiben zu können, führt man folgenden Differenzenoperator ein:[6]

Es ist

Die -te Ableitung der Bézierkurve lässt sich jetzt wie folgt schreiben:



Speziell für und erhält man
- und


Graderhöhung einer Bézierkurve
Eine wichtige Manipulation der Darstellung einer vorgegebenen Bézierkurve ist die sog. Graderhöhung. Sie ist vergleichbar mit dem Anfügen von Termen an ein Polynom . Dabei ändert sich das Polynom nicht und der (scheinbare) Grad wird erhöht. Analog stellt man eine fest vorgegebene Bézierkurve in der Form mit geeigneten neuen Kontrollpunkten dar. Um die neuen Kontrollpunkte zu bestimmen, multipliziert man die ursprüngliche Darstellung mit dem Faktor :






Die neuen Kontrollpunkte sind also:[7]


Kontrollpolygone bei ein-, zwei- und 10-maliger Graderhöhung}
Wesentliche Eigenschaften der Graderhöhung sind:
- Wiederholte Graderhöhung führt zu einer Approximation der Bézierkurve durch das Kontrollpolygon.
- Die größere Anzahl von Kontrollpunkten bietet mehr Freiheitsgrade, die Kurve zu verändern.
- Mehrere Bézierkurven lassen sich auf einen einheitlichen Grad bringen. Dies ist wichtig bei Tensorprodukt-Bézierflächen.
- Damit lassen sich auch dann quadratische Bézierkurven als kubische darstellen, falls ein Vektorzeichenprogramm (z. B. Inkscape) bzw. eine Grafikbibliothek (z. B. Cairo) nur kubische unterstützt.
Teilung einer Bézierkurve

Eine Bézierkurve ist normalerweise definiert für . Sei nun . Dann ist mit ein Teil der gegebenen Bézierkurve. Es soll nun die Teilkurve als Bézierkurve mit vom (selben) Grad mit geeigneten Kontrollpunkten dargestellt werden. Setzt man , so muss die folgende Gleichung erfüllt sein:







![{\displaystyle u\in [0,1]}](../I/5ab4b2bf4a8cda1b335fdb4f789c61285c971034.svg)


- für

![{\displaystyle \quad t\in [0,c]}](../I/a2371062c134cb2c4836c6c28410c494e35cb626.svg)
- (s. Casteljau-Alg. und Abbildung)

Denn
-
- wegen
- (s. Eigensch. (S) der Bernst.-Pol.)





Der restliche Bogen ist die Bézierkurve mit den Kontrollpunkten

- (s. Abbildung)

Rationale Bézierkurven
Rationale Kurven und projektive Kurven
Bézierkurven sind parametrisierte Kurven, deren Parameterdarstellungen nur Polynome verwenden. Leider lassen sich so wichtige und geometrisch einfache Kurven wie Kreise nicht durch polynomiale Parameterdarstellungen beschreiben. Dieser Nachteil ist u. a. das Motiv für die Erweiterung der als Parameterfunktionen zulässigen Funktionen auf rationale Funktionen. Denn jeder Kegelschnitt hat eine rationale Darstellung. Da eine Kurve mit einer rationalen Darstellung

wobei die Funktionen und Polynome sind, in homogenen Koordinaten die polynomiale Darstellung



besitzt, lassen sich ebene Kurven mit rationalen Koeffizientenfunktionen als Zentralprojektion einer Bézierkurve im auf die Einbettungsebene auffassen.

Die analoge Aussage gilt für Kurven im . Sie lassen sich als Zentralprojektion einer Bézierkurve im auf den Einbettungsraum auffassen. Damit lassen sich die Vorteile der Bézier-Darstellung einer polynomialen Kurve auch für rationale Kurven nutzen.





Ebene rationale Bézierkurven
Es sei nun festgewählt und die Vektoren beschreiben ein Polygon im . Dann ist


eine (räumliche) Bézier-Kurve vom Grad . Die Punkte sind die Kontrollpunkte der (räumlichen) Bézierkurve. Fasst man die 1-dimensionalen Unterräume


als Punkte der reellen projektiven Ebene mit der Ferngerade auf, so bezeichnet man den affinen Anteil (Projektion vom Nullpunkt aus auf die Ebene ) dieser projektiven Kurve als rationale Bézierkurve.

Die Kontrollpunkte der Bézierkurve im lassen sich folgendermaßen beschreiben:
- falls nicht auf der Ferngerade und
- falls auf der Ferngerade liegt.


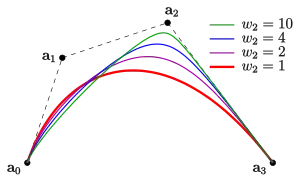
Beim Übergang zu inhomogenen Koordinaten wird ein Kontrollpunkt entweder auf den affinen Punkt oder auf den Fernpunkt in Richtung abgebildet. Der Punkt heißt eigentlicher bzw. uneigentlicher Kontrollpunkt der rationalen Bézierkurve und die Zahl heißt das Gewicht des Kontrollpunktes . Eine rationale Bézierkurve hat folgende affine Beschreibung:[10][11]



wobei für eigentliche und für uneigentliche Kontrollpunkte zu setzen ist.


Die rationalen Bézierkurven haben (u. a.) die folgenden Eigenschaften:
Sind eigentliche Kontrollpunkte bzw. die Gewichte einer rationalen Bézierkurve , so gilt


- Die Kurve enthält die Kontrollpunkte (erster bzw. letzter Punkt des Kontrollpolygons).
- Die Tangente im Punkt bzw. hat die Richtung bzw. .
- Eine Erhöhung des Gewichts bewirkt eine Veränderung der Kurve auf den Kontrollpunkt zu. (s. Abbildung)






Zusammenfassung:
Eine ebene rationale Bézierkurve besitzt neben dem Kontrollpolygon noch die Gewichte als Designparameter. Will man eine Kurve erzeugen, legt man zunächst die Kontrollpunkte und die Gewichte fest. Dadurch wird dann auch eine räumliche (gewöhnliche) Bézierkurve mit den Kontrollpunkten definiert. Die Projektion dieser Kurve (vom Nullpunkt aus) auf die x-y-Ebene () liefert dann die ebene rationale Bézierkurve. Eine Variation der Gewichte ändert nicht die Kontrollpunkte , aber die (räumlichen) Kontrollpunkte und damit die zugehörige räumliche Bézierkurve und schließlich auch die (ebene) rationale Bézierkurve. Erhöht man ein Gewicht , so entfernt sich der zugehörige Kontrollpunkt vom Nullpunkt und zieht die räumliche Bézierkurve mit. Der zugehörige Kontrollpunkt dagegen bleibt unverändert. Die rationale Bézierkurve bewegt sich auf ihn zu (s. Bild). Verringert man das Gewicht, bewegt sich die Kurve von dem Kontrollpunkt weg. Falls alle Gewichte 1 sind, ist die rationale Bézierkurve eine gewöhnliche Bézierkurve mit den Kontrollpunkten .

Kegelschnitte als rationale Bézierkurven
Parabel:
Eine Bézierkurve vom Grad zwei mit nicht kollinearen Kontrollpunkten
im
ist immer eine Parabel (s. oben). Um eine Parabel als (ganz-)rationale Bézierkurve darzustellen, wählt man drei nicht kollineare Kontrollpunkte und setzt und . Letzteres bedeutet: Die Kontrollpunkte sind alle eigentlich.





Ellipsen und Hyperbeln lassen sich durch Zentralprojektion von Parabeln im , deren Ebenen nicht den Nullpunkt enthalten, auf die Einbettungsebene erzeugen.


Hyperbel:
Für die Kontrollpunkte

beschreibt


eine Parabel, die auf dem Kegel mit der Gleichung liegt (s. Bild). Die Kontrollpunkte und Gewichte der zugehörigen (ebenen) rationalen Bézierkurve sind:

- bzw. :.


sind uneigentliche Kontrollpunkte. Damit ist und der Nenner (s. o.) der rationalen Komponenten ist .



Also ist die zugehörige rationale Bézierkurve


Dies ist eine rationale Parameterdarstellung eines Astes der Hyperbel mit der Gleichung .

Die Änderung liefert eine rationale Bézierdarstellung der Hyperbel .



Kreis:
In dem folgenden Beispiel sind die Kontrollpunkte der (räumlichen) Parabel:
- .

Die Bézierkurve

liegt in diesem Fall auf dem Kegel mit der Gleichung (s. Abbildung). Die Kontrollpunkte und Gewichte der zu gehörigen rationalen Bézierkurve sind:

- bzw. .


ist uneigentlicher Kontrollpunkt. Damit ist und der Nenner (s. o.) der rationalen Komponenten ist .


Also ist die zugehörige rationale Bézierkurve



Für ist dies eine rationale Parameterdarstellung eines halben Einheitskreises.
Setzt man erhält man eine rationale Bézierdarstellung der Ellipse mit der Gleichung .


Anwendung: Kreisapproximation durch kubische Bézierkurven
Kreise bzw. Kreisbögen lassen sich durch Bézierkurven nicht exakt, sondern nur genähert darstellen. Eine solche Näherung ist z. B. für die Gestaltung einer Typ-1-PostScript-Schrift nötig, da hier nur Strecken und Bézierkurven dritten Grades erlaubt sind. (Jedoch verläuft auch für größere keine Bézierkurve -ten Grades in einem noch so kleinen Kreisbogen mit Radius zum Mittelpunkt , denn liegt genau dann auf dem Kreisbogen, wenn Nullstelle der Polynomfunktion vom Grad ist, was höchstens Male vorkommt – vgl. Fehleranalyse.)




![t\mapsto [x(t)-z_{1}]^{2}+[y(t)-z_{2}]^{2}-r^{2}](../I/3e8c093fda18e3f696302e65e9eaac0d5bb0b10a.svg)

Teilt man einen Kreis in nur zwei (gleich große) Segmente und nähert die Halbkreise durch kubische Bézierkurven, zeigen sich größere Abweichung von der Kreisgestalt. Durch eine feinere Unterteilung in mehr Segmente lässt sich ein Kreis besser nähern. Je geringer der überstrichene Winkelbereich des Kreissegments ist, desto genauer ist die Näherung durch die Bézierkurve. Eine oft verwendete, einfache Realisierung eines Kreises verwendet vier Viertelkreisbögen, die als kubische Bézierkurven dargestellt werden. Um die Verbesserung der Näherung durch Verfeinerung der Unterteilung zu demonstrieren, werden in der Folge die Fehler der Halbkreisapproximation und der Viertelkreisapproximation miteinander verglichen.
Notation: Wir untersuchen Approximationen eines Kreises mit folgenden Parametern:

- ist der Radius von
- ist der Mittelpunkt von
- die Kontrollpunkte und liegen vom Mittelpunkt im Abstand entfernt (also auf der Kreislinie von )
- ist eine reelle Zahl zwischen 0 und 1 ( entspräche einer quadratischen Bézierapproximation).





Die zusätzlichen Kontrollpunkte und werden so gewählt, dass zu und zu den Abstand hat.



Beispielkoordinaten Viertelkreis:
Als einfaches Beispiel einer Viertelkreisapproximation wählen wir:
- den Mittelpunkt des Kreises als ,
- den Kontrollpunkt auf der Kreislinie als ,
- den Kontrollpunkt auf der Kreislinie als – die Strecke steht also senkrecht auf , so dass beide Strecken einen Viertelkreissektor bilden –,
- den Kontrollpunkt als (auf der Strecke ),
- den Kontrollpunkt als (auf der Strecke ).









Die vier Kontrollpunkte liegen also auf dem Rand des Quadrats mit den Eckpunkten , , und . Dies gewährleistet immerhin, dass die Näherungskurve und die Kreislinie in und dieselbe Tangente haben. So ist auch die aus den Viertelkreisapproximationen zusammengesetzte Kurve in den Knotenpunkten „glatt“.




Die kubische Bézierkurve () hat mit diesen Kontrollpunkten folgende Form:

![t\in [0;1]](../I/96a49ca7444bf740c79e71e58ad94040e59a09a6.svg)

Eine recht gute Approximation des oberen rechten Viertelkreisbogens erhält man mit , wie die nachfolgende Betrachtung zeigt.

Fehleranalyse:
Die Abweichung der gerade angegebenen Bézierkurve vom darzustellenden Kreis lässt sich folgendermaßen quantifizieren:
Ein Punkt der Bézierkurve liegt genau dann auf der vorgegebenen Kreislinie mit Radius um den Mittelpunkt , wenn („Koordinatengleichung“) gilt. Definiert man




so ist das äquivalent zu . ist ein Maß für die Abweichung der Approximation von der Kreisgestalt.


Fordert man dann die Übereinstimmung der Bézierkurve mit dem Kreis bei der Winkelhalbierenden, erhält man

Der Fehler ist Null bei , sonst überall positiv, d. h. die Bézierkurve liegt stets auf oder außerhalb des Kreisbogens. Der maximale Fehler beträgt bei und bei .




Fordert man, dass die aufsummierten Fehler über die gesamte Kurve verschwinden ( kann sowohl positiv als auch negativ sein – die Bézierkurve verläuft teils außerhalb, teils innerhalb der Kreislinie – und das Integral darüber kann Null ergeben), erhält man

Die größten Abweichungen liegen bei etwa und bei . Beide Approximationen sind somit für viele Anwendungsbereiche ausreichend.


Beispielkoordinaten Halbkreis:
Bei einer Halbkreisnäherung mit , , , und , mit beträgt die maximale Abweichung . Dies ist bzgl. der maximalen Abweichung etwa 50 mal schlechter als die Viertelkreisapproximation.





Literatur
- Gerald Farin: Curves and Surfaces for CAGD. A practical guide. 5. Auflage. Academic Press, San Diego 2002, ISBN 1-55860-737-4
- J. Hoschek, D. Lasser: Grundlagen der geometrischen Datenverarbeitung. Vieweg+Teubner Verlag, 1989, ISBN 978-3-519-02962-5
- David Salomon: Curves and Surfaces for Computer Graphics. Springer Science+Business Media, 2006, ISBN 0-387-24196-5
- Boaswan Dzung Wong: Bézierkurven: gezeichnet und gerechnet. Orell Füssli Verlag, Zürich 2003, ISBN 3-280-04021-3
- Wolfgang Boehm, Gerald Farin, Jürgen Kahmann: A survey of curve and surface methods in CAGD. In: Comput. Aided Geom. Des., 1, S. 1–60, 1984
Weblinks
- Eric W. Weisstein: Bézier Curve. In: MathWorld (englisch).
- Computerunterstützte Darstellende und Konstruktive Geometrie. (CDKG) Uni Darmstadt (PDF; 3,4 MB), S. 74,227.
- Dr. Hans Walser, Mathematisches Institut der Universität Basel: Die Modellierung des schönen Scheins, Mathematikinformation Nr. 55, Seite 10, Abschnitt 10.2
Vier Stützpunkte
Mehr als vier Stützpunkte
- TinySpline. Open Source C-Programmbibliothek für NURBS, B-Splines und Bézier Splines mit Bindings für verschiedene Sprachen
Einzelnachweise
- Farin, S. 37
- Hoschek&Lasser, S. 120
- Farin S. 38
- Farin S. 40
- Farin: S. 48
- Farin: S. 44
- Farin: S. 51
- Farin S. 87
- Hoschek&Lasser S. 128
- Farin S. 231
- Hoschek&lasser S. 143