Autorotation
Autorotation ist eine durch den Fahrtwind angetriebene Drehung des Hauptrotors eines Tragschraubers oder eines Hubschraubers. Dabei strömt die Luft schräg von unten gegen den Hauptrotor, der dadurch ähnlich einer Windkraftanlage angetrieben wird. Die schnelle Bewegung der Rotorblätter durch die Luft erzeugt durch dynamischen Auftrieb eine Kraft, die der Schwerkraft entgegenwirkt.
Wenn die Autorotation stark genug ist, reicht dieser Auftrieb aus, um das Gerät in der Luft zu halten. Beim Tragschrauber ist dies der normale Flugzustand. Um dauerhaft für einen ausreichenden Fahrtwind zu sorgen, werden sie mit einem motorgetriebenen Propeller angetrieben. Beim Hubschrauber ist die Autorotation eine Notmaßnahme, die verhindert, dass er bei einem Ausfall des Triebwerks ungebremst zu Boden fällt. Der Hauptrotor muss dafür vom Piloten in einen geeigneten Winkel zum Fahrtwind gebracht werden. Während der Autorotation sinkt der Hubschrauber schnell. Er bleibt aber steuerbar, sodass eine Notlandung möglich ist.
Autorotation bei Drehflügelflugzeugen
Tragschrauber
Bei einem Tragschrauber dient ein antriebsloser Rotor anstelle fester Tragflächen der Erzeugung des Auftriebs. Der Vortrieb erfolgt durch einen Motor und Propeller oder durch Schleppen. Damit befindet sich der Tragschrauber – im Gegensatz zum Hubschrauber – permanent in Autorotation.
Hubschrauber
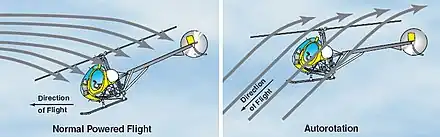
Die Autorotation ermöglicht es, einen Hubschrauber ohne über die Motorwelle angetriebenen Hauptrotor zu landen. Sie ist Basis des Notmanövers nach Ausfall des Motorantriebes oder notwendiger Drosselung dieses Antriebes nach Ausfall des Heckrotors. Sie ist vergleichbar mit dem Gleiten eines Flugzeugs ohne (funktionierenden) Motor und gliedert sich in zwei Phasen:
In der ersten Phase werden Höhe und Geschwindigkeit des Fluggerätes im kontrollierten, aber relativ steilen Gleitflug in Drehzahl des Rotors umgewandelt, die Luftströmung von unten („Fahrtwind“) bewirkt den Antrieb des Rotors. Dazu wird der Anstellwinkel des Rotors mit dem Kollektivhebel (Pitch) sehr niedrig eingestellt. Somit hat der Rotor einen geringen Widerstand, erzeugt aber nur noch wenig Auftrieb. Das Prinzip der Auftriebserzeugung gleicht in diesem Flugzustand dem des Tragschraubers. In dieser Phase soll bei beherrschbarer Geschwindigkeit und Sinkrate möglichst viel Rotationsenergie im Rotor aufgenommen werden. Als optimal gilt, abhängig vom Typ des Fluggeräts, eine Geschwindigkeit von 110 bis 130 km/h bei einer Sinkrate von 5 bis 10 m/s. Die Rotordrehzahl wird im Bereich um 100 % gehalten – die Steuerung erfolgt mit dem Kollektiv. Um eine „Streckung“ des Flugweges zu erreichen, kann die Rotordrehzahl reduziert werden, je nach Muster auf bis zu 85 Prozent der Rotationsgeschwindigkeit bei gleichzeitiger Erhöhung der Geschwindigkeit. Dadurch kann ein etwas weiter entfernter Notlandeplatz erreicht werden. Ziel dieser Phase ist, Hindernisse zu überwinden und einen geeigneten Notlandeplatz zu erreichen.[1]
In der zweiten Phase, der abschließenden Annäherung an den Boden, wird durch stärkeres Anstellen der Rotorblätter (Pitch) kurzzeitig mehr Auftrieb erzeugt, um die Sink- und Horizontalgeschwindigkeit (über Grund) abzubremsen und ein kurzes Ausschweben (flare) durchzuführen. Dabei wird die im drehenden Rotor und Getriebe gespeicherte kinetische Energie (der Schwung) rasch abgebaut, sodass für das Manöver nur ein kurzer Zeitrahmen zur Verfügung steht. Angestrebt wird eine „Zielbremsung“ mit möglichst stoßarmem weichem Aufsetzen am Boden.
Die Autorotationslandung stellt hohe Anforderungen an den Piloten und erfordert regelmäßiges Training, da das richtige Maß und der Zeitpunkt der Pitch-Veränderung präzise getroffen werden müssen. Dies ist vor allem darin begründet, dass die kinetische Energie des Rotors nur einmal zur Auftriebserhöhung (nötig zum Bremsen des raschen Sinkflugs während der Abstiegsphase) zur Verfügung steht. Wird der Anstellwinkel zu früh erhöht, ist der Hubschrauber schon in zu großer Höhe abgebremst und wird dann bei nachlassender Drehgeschwindigkeit des Hauptrotors „durchsacken“. Wird der Anstellwinkel zu spät erhöht, reicht die verbleibende Flughöhe nicht mehr aus, um den Hubschrauber ausreichend abzubremsen.[2]
Für die Durchführbarkeit einer Autorotationslandung ist die Flughöhe entscheidend: Nur bei ausreichender Höhe über dem Boden kann ein (aufgrund etwa eines Motorausfalls) zu langsam drehender Rotor in der ersten Phase der Autorotationslandung wieder ausreichend Drehzahl aufnehmen.
Es werden derzeit Systeme entwickelt, die den Übergang in die Autorotation nach dem Motorausfall automatisieren und den Piloten so entlasten.[2]
Physikalischer Hintergrund
Der Rotor wird in der Autorotation von unten angeströmt. Am Rotorblatt treten in der Autorotation drei verschiedene Strömungszustände auf:
- Der innere Bereich des Rotors befindet sich im Strömungsabriss, da dieser zu steil angeströmt wird.
- Der mittlere Bereich des Rotors wirkt antreibend, da hier die resultierende Kraft aus Auftriebs- und Widerstandskraft nach vorne geneigt ist.
- Der äußere Bereich des Rotors wirkt bremsend, da hier die resultierende Kraft aus Auftriebs- und Widerstandskraft nach hinten geneigt ist.
Im stationären Sinkflug mit Autorotation stellt sich ein Kräftegleichgewicht ein, so dass die Brems- und Antriebskräfte gleich groß sind.[1]
Tandemrotor
Auch Tandem-Rotorhubschrauber wie der Boeing-Vertol CH-47 können per Autorotation landen, wenn einer der Drehflügel ausfällt.[3]
Literatur
- Kapitel 18 Autorotation. In: Willem J. Wagtendonk: Principles of Helicopter Flight. 2nd Edition, reprinted. Aviation Supplies & Academics, Newcastle WA 2010, ISBN 978-1-56027-649-4, S. 141–156.
- Ernst Götsch: Luftfahrzeugtechnik. Einführung, Grundlagen, Luftfahrzeugkunde. 3. Auflage. Motorbuchverlag, Stuttgart 2003, ISBN 3-613-02006-8.
Einzelnachweise
- Autorotation. Abgerufen am 7. Januar 2024.
- Weltpremiere: Sicherheitssystem landet Hubschrauber ohne Motorenenergie. 15. November 2023, abgerufen am 7. Januar 2024.
- Theory of Operations. S. 7 (chinook-helicopter.com [PDF]).