Autonomes Unterwasserfahrzeug
Ein autonomes Unterwasserfahrzeug[1] (in Fachliteratur auch AUVs, von englisch autonomous underwater vehicles) gehört zur Kategorie der unbemannten Unterwasserfahrzeuge und führt autonom Aufgaben im Meer aus.



Einsatzgebiete
Beispielsweise setzen Öl- und Gasindustrie sie offshore ein, um detaillierte bathymetrische Karten eines Geländes zu erstellen, bevor unterseeische Infrastruktur installiert wird. AUVs werden auch zur Kabel- und Pipelineinspektion benutzt. Die häufigste militärische Anwendung von AUVs ist die Seeminenerkennung und -abwehr. AUVs werden auch in der ozeanografischen Forschung eingesetzt um z. B. bathymetrische Daten zu sammeln, Methanvorkommen zu detektieren und hydrothermale Quellen in der Tiefsee zu finden.[2][3][4]
Technische Voraussetzungen
Autonome Tauchroboter sind im Allgemeinen torpedoförmig und werden von einem Propeller am Heck angetrieben. Sie arbeiten im Gegensatz zu ferngesteuerten Unterwasserfahrzeugen (ROVs) völlig selbständig, das heißt unabhängig vom Trägerschiff und ohne Kabel. Heute werden AUVs gebaut, die eine Wassertiefe von bis zu 6000 m erreichen können. Die Tauchzeiten reichen von Stunden und Tagen bis zu mehreren Monaten am Stück bei Gleit-AUVs (Glider). AUVs benötigen im Verlauf des Einsatzes nur geringe technische und logistische Unterstützung. Sie können in Regionen arbeiten, in die kein bemanntes Tauchboot oder ROV vordringen kann, zum Beispiel in Eisgebieten.
Durch die autarke Arbeitsweise von AUVs ergeben sich spezielle technische Herausforderungen:
- Die Stromversorgung von Antrieb, Fahrzeugsensorik und Nutzlastkomponenten muss sichergestellt werden. Die gesamte für einen Einsatz benötigte elektrische Energie muss an Bord des Fahrzeugs transportiert werden. Dafür werden bisher vorzugsweise Batterien und Akkus verwendet, es werden aber auch Brennstoffzellen und luftunabhängige Dieselmotoren (Closed Cycle Diesel Engine) benutzt.
- AUVs benötigen anspruchsvolle Steuerungssoftware, damit sie autonom Entscheidungen treffen können. Sie müssen beispielsweise Hindernisse auf ihrer Route erkennen und ihnen ausweichen oder auf technische Probleme wie ausgefallene Sensoren angemessen reagieren.
- Kommunikation – auch im Fehlerfall – ist mit AUVs kaum möglich, da Funksignale vom Wasser stark absorbiert werden; es müssen also entsprechende Notfallprotokolle eingerichtet werden. Da sie unter Polareis im Fehlerfall nicht auftauchen können, gehen AUVs bei entsprechenden Missionen verhältnismäßig häufig verloren.
Forschung und Entwicklung
Gegenwärtig sind AUVs Gegenstand einiger Forschungsprojekte, die sich mit den zentralen Problemen der Fahrzeuge auseinandersetzen. Wichtige Punkte sind die Miniaturisierung der Fahrzeuge, Simultane Lokalisation und Kartographie, die zwar im zweidimensionalen Fall als gelöst angesehen werden kann, in dreidimensionalen Unterwasserumgebungen jedoch als bisher ungelöstes Problem gilt, und autonome Entscheidungsfindung.
Es gibt einige öffentlich geförderte Projekte, die in Form von studentischen Wettbewerben die Arbeit an diesen Problemen vorantreiben wollen. Beispiele hierfür sind der von den englischen und französischen Verteidigungsministerien (insbesondere dem Dstl) gemeinsam veranstaltete SAUC-E oder der vom AUVSI und dem ONR veranstaltete International Autonomous Underwater Vehicle Competition. Bei diesen Wettbewerben sind Preisgelder von einigen zehntausend Euro bzw. Dollar ausgeschrieben.
Einsatz in der Hydrometrie
Für die wasserwirtschaftliche Bewirtschaftung von Seen, Stauseen und Talsperren ist es heute von großer Bedeutung, zuverlässige Datensätze in hoher räumlicher und zeitlicher Auflösung zu erhalten. Neben der Messung von Abfluss, Fließgeschwindigkeit und Wasserstand gibt es eine Vielzahl von Messaufgaben, wie z. B. die Bathymetrie, die Bewertung der Wasserqualität anhand von Güteparametern, sedimentologische Eigenschaften und morphologische Veränderungen der Gewässersohle. Darüber hinaus sind Aspekte wie der Eintrag und die Verteilung von Sedimenten und Nährstoffen, das verfügbare Speichervolumen und die Entwicklung der Wassertemperatur von entscheidender Bedeutung.

In der Vergangenheit wurden hydrometrische Messungen in stehenden Gewässern häufig als Einzelpunktmessungen durchgeführt. Die Lage der Gewässersohle und der Wasserstand wurden durch aufwändige Messungen mit Lot bestimmt. Für ein dichtes Messnetz musste dieser Vorgang an mehreren Koordinaten zeitaufwändig wiederholt werden. Auch andere Parameter wie Sedimentbeschaffenheit oder Wasserqualität konnten nur an den Entnahmestellen gemessen werden. Um umfassendere Informationen für die Tiefenkartierung und die Erfassung der Bathymetrie zu erhalten, wurden hydroakustische Aufnahmen während der Echolotfahrten eingesetzt. Der große Vorteil bestand darin, flächendeckende Informationen über bestimmte Quer- oder Längsprofile eines Gewässers zu erhalten.
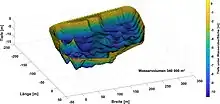

Autonome Unterwasserfahrzeuge bieten den Vorteil, dass sie nach vorheriger Programmierung das zu untersuchende Gebiet im Wasser schwimmend oder tauchend selbständig abfahren und dabei verschiedene Messparameter gleichzeitig erfassen können. Diese tauchfähigen, oft torpedoförmigen Messgeräteträger, die mit einer Vielzahl von Sensoren, Antrieben und Steuerungen ausgerüstet sind, erweisen sich für hydrometrische Messungen in der Wasserwirtschaft, im Wasserbau und in der Forschung als äußerst nützlich. Der Schwerpunkt liegt dabei auf der Erfassung von Wassertiefen (Bathymetrie), Strömungsdaten und Parametern zur Beurteilung der Wasserqualität. Der potentielle Nutzen für wasserwirtschaftliche und wasserbauliche Aufgaben, wie z. B. Monitoringaufgaben oder die Erfolgskontrolle von Bauvorhaben, wird als sehr vielversprechend eingeschätzt[6].
Siehe auch
- DeepC AUV aus Deutschland mit Wasserstoff-Antrieb
- Deep Phreatic Thermal Explorer
- Remotely Operated Vehicle
- Unterwassergleiter
Literatur
- Gwyn Griffiths: Technology and Applications of Autonomous Underwater Vehicles. Taylor & Francis, London 2002, ISBN 978-0-415-30154-1.
- Gianluca Antonelli: Underwater robots – motion and force control of vehicle-manipulator systems. Springer, Berlin 2006, ISBN 978-3-540-31752-4.
- Rajendra Jani: Development of an autonomous underwater vehicle – Hydrocopter. Vdm Verlag, Saarbrücken 2009, ISBN 978-3-639-09644-6.
- Ian Kemp et al.: Unmanned Vehicles Handbook 2009. The Shephard Press, Slough 2008, ISBN 978-1-907454-04-2.
- Nathaniel Fairfield (et al.): Field Results of the Control, Navigation, and Mapping Systems of a Hovering AUV. Intl. Symp. on Unmanned Untethered Submersible Technology, 2007 Abstract online (PDF; 1,9 MB)
Weblinks
- Autonomous Undersea Vehicle Applications Center
- Vorstellung des AUV Abyss des GEOMAR in Kiel (deutsch)
- Einführung in das AUV B-Seal des Marum in Bremen (deutsch)
Einzelnachweise
- Alfred-Wegener-Institut für Polar- und Meeresforschung
- Unterwasser-Roboter durchquert Atlantik (Memento des vom 13. Dezember 2009 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis. science.orf.at; Unmanned research sub crosses Atlantic CNN, abgerufen am 11. Dezember 2009.
- AUV MARUM-SEAL marum.de, abgerufen am 16. Oktober 2011
- Thomas Wilke: Torpedo mit Scharfblick. S. 43–45, in: Bild der Wissenschaft 10/2011, ISSN 0006-2375
- Hydromechanik und Wasserbau, Instituts für Wasserwesen der Universität der Bundeswehr München, abgerufen am 15. September 2023
- Ivo Baselt: Autonomous Vehicles in der Hydrometrie - Ein Erfahrungsbericht. In: WASSERWIRTSCHAFT. Band 113, Nr. 7-8, August 2023, ISSN 0043-0978, S. 43–46, doi:10.1007/s35147-023-1873-8 (springerprofessional.de [abgerufen am 15. September 2023]).