
Una máquina cenciella ye un dispositivu mecánicu que camuda la direición o la magnitú d'una fuercia.[2][3] Les máquines cencielles tamién pueden definise como los mecanismos más cenciellos qu'utilicen una ventaya mecánica (tamién llamada rellación de multiplicación) p'amontar una fuercia.[4] Polo xeneral, el términu refierse a les seyes máquines cencielles clásiques que fueron clasificaes y estudiaes polos científicos del Renacimientu:[5]
- Lleva
- Tornu
- Polea
- Planu inclináu
- Cuña
- Torniellu
Dende l'alborecer de la Revolución Industrial ata l'actualidá, la concepción teórica de les máquines evolucionó de forma bultable. Sicasí, el conceutu clásicu de máquina cenciella sigui calteniendo la so vixencia, tanto pola so significación histórica, como por ser un pervaloratible elementu didácticu abondo utilizáu na enseñanza de delles nociones básiques de la física.[6]
Les máquines cencielles clásiques
Acordies cola clasificación establecida nel Renacimientu, les seyes máquines cencielles son:
Palanca
| Les seis máquines cencielles clásiques: | ||
Palanca: |
Tornu: |
Polea: |
Planu inclináu: |
Cuña: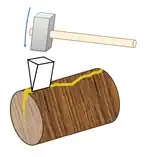 |
Torniellu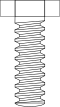 |
| Tipos de palanca: | ||
 |
 |
 |
| 1ª Clase | 2ª Clase | 3ª Clase |
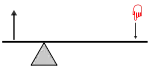
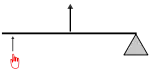
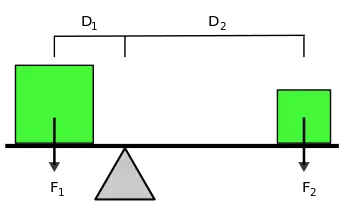
- La Lleva ye una barra tiesa con un puntu de sofitu, llamáu fulcru, a la que s'aplica una fuercia y que, xirando sobre'l puntu de sofitu, vence una resistencia. Cúmplese'l caltenimientu de la enerxía y, poro, la fuercia aplicao pol espaciu percorríu tien de ser igual a la fuercia de resistencia pol espaciu percorríu.
Tornu
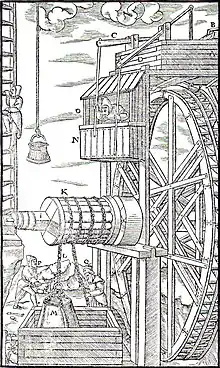
- El tornu ye una máquina simple con forma de cilindru que xira llibremente alredor de la so exa, de forma que permite enrollar una cuerda o un cable del que se suspenden cargues que se precisa mover verticalmente.
Polea
- La polea ye un dispositivu mecánicu de tracción constituyíu por una rueda acanalada o roldana per onde pasa una cuerda, lo que permite tresmitir una fuercia nuna direición distinta a l'aplicada. Amás, formando apareyos o polipastos de dos o más polees ye posible tamién aumentar la magnitú de la fuercia tresmitida pa mover oxetos pesaos, a cambiu d'un amenorgamientu del movimientu producíu.
Planu inclináu
- Nel planu inclináu aplícase una fuercia pa vencer la resistencia vertical del pesu del oxetu a llevantar. Dau el principiu de caltenimientu de la enerxía, cuanto más pequeñu sía l'ángulu del planu inclináu, más pesu podrá alzase cola mesma fuercia aplicada, pero a cambiu, la distancia a percorrer va ser mayor.
Cuña
- La cuña tresforma una fuercia vertical en dos fuercies horizontales de sentíu contrariu. L'ángulu de la cuña determina la proporción ente les fuercies aplicada y la resultante, d'una manera paecida al planu inclináu. Ye'l casu d'hachos o cuchiellos.
Torniellu
- El mecanismu de rosca tresforma un movimientu xiratoriu aplicáu a un volante o maniya, n'otru rectilliniu nel fusu, por aciu un mecanismu de torniellu y tuerca. La fuercia aplicao pol llargor de la circunferencia del volante hai de ser igual a la fuercia resultante pol avance del fusu. Dau el gran desenvolvimientu de la circunferencia y el de normal pequeñu movimientu del fusu, la rellación ente les fuercies ye enforma grande. Ferramientes como'l gatu del coche o'l sacacorchos deriven del funcionamientu del torniellu.
Pese al calter tradicional de la llista anterior, nun ye infrecuente atopar llistes qu'incluyan dalgún elementu mecánicu distintu. Por casu, dellos autores consideren a la cuña y al torniellu como aplicaciones del planu inclináu; otros incluyen la rueda como una máquina cenciella; tamién se considera la exa con ruedes una máquina simple, anque sía la resultancia de xuntar otres dos máquines cencielles.[7]
Carauterístiques
Una máquina cenciella utiliza una única fuercia aplicada tresformándola nuna fuercia resultante, que realiza un trabayu moviendo una sola carga (o venciendo una fuercia resistente). Si s'omiten les perdes por rozamientu, el trabayu realizáu pola fuercia aplicada ye igual al trabayu realizáu pola fuercia resultante sobre la carga. La máquina puede aumentar la magnitú de la fuercia aplicada a lo llargo d'una determinada distancia (al tresformala na fuercia resultante), pero a cuenta de un amenorgamientu proporcional na distancia percorrida pola carga. La rellación ente la fuercia aplicada y la fuercia resultante llámase ventaya mecánica.
Les máquines simples pueden considerase los bloques de construcción elementales a partir de los que se diseñen máquines más complexes (denominaes n'ocasiones "máquines compuestes" como por casu, el mecanismu d'una bicicleta, onde s'utilicen ruedes, palanques y polees).[8][9][4][10] como por casu, el mecanismu d'una bicicleta, onde s'utilicen ruedes, palanques y polees).[11][12] La ventaya mecánica d'una máquina compuesta ye'l productu de les ventayes mecániques de les máquines simples de les que ta compuesta.
Historia
La idea de máquina cenciella anicióse alredor del sieglu III e.C. col físicu griegu Arquímedes, qu'estudió la lleva, la polea, y el torniellu.[4][13] Descubrió el principio de ventaya mecánica, reflejada en la famosa frase tradicionalmente atribuida[14] a Arquímedes al respective de la palanca: "Dame un puntu de sofitu, y moveré la Tierra." (en griegu: δῶς μοι πᾶ στῶ καὶ τὰν γᾶν κινάσω)[15] cola qu'espresaba la so comprensión de que nun hai llende a la cantidá d'amplificación de la fuercia que podría llograse por aciu l'usu de la ventaya mecánica. Darréu, otros físicos griegos definieron les cinco máquines cencielles clásiques (ensin incluyir el planu inclináu) y fueron capaces de calcular con mayor o menor propiedá la so ventaya mecánica.[9] Por casu, Herón d'Alexandría (circa 10-75 dC) na so obra Mecánica incluye la so famosa llista de cinco mecanismos que pueden "poner una carga en movimientu": lleva, tornu, polea, cuña, y torniellu,[13] describiendo la so fabricación y usos.[16] Sicasí la comprensión de los griegos llindábase a la estática de les máquines cencielles (l'equilibriu de fuercies); y nun incluyía la considerancia d'efeutos dinámicos, l'equilibriu ente la fuercia y la distancia, o'l conceutu de trabayu mecánicu.
Mientres el Renacimientu la dinámica de les potencies mecániques, como se llamaron les máquines cencielles, empezó a estudiase dende'l puntu de vista de lo lloñe que podía izase una carga, o de la fuercia que podía aplicase. Esto llevó finalmente al nuevu conceutu de trabayu mecánicu. En 1586, l'inxenieru flamencu Simon Stevin dedució la ventaya mecánica del planu inclináu, lo que llevó a incluyilo coles otres máquines cencielles. La teoría dinámica completa de les máquines cencielles foi ellaborada pol científicu italianu Galiléo Galilei en 1600 na so obra Le Meccaniche (Sobro la mecánica), na qu'amosaba la semeyanza matemática soxacente de les distintes máquines.[17][18] Foi'l primeru n'entender que les máquines simples nun crean enerxía, sinón que solamente la tresformen.[17]
Les regles clásiques del rozamientu por eslizamientu nes máquines fueron afayaes por Leonardo da Vinci (1452-1519), pero nun les incluyó nos sos cuadernos. Fueron redescubiertas por Guillaume Amontons (1699) y desenvueltes por Charles-Augustin de Coulomb (1785).[19]
La mecánica moderna amplió la noción sobre les máquines cencielles, que describíen de forma demasiáo somera la gran variedá de máquines complexes que surdieron a partir de la Revolución Industrial. Dende'l sieglu XIX, distintos autores compilaron llistes enantaes de "máquines cencielles", de vezu utilizando términos como máquines básiques,[11] máquines compuestes,[8] o elementos d'una máquina, pa estremales de les máquines cencielles clásiques anteriores. A finales de 1800, Franz Reuleaux[20] identificara cientos de mecanismos elementales, que calificaba como máquines simples. Representaciones del diseñu (KMODDL) d'estos preseos pueden atopase nos modelos cinemáticos de la páxina web de la Universidá de Cornell.[21]
(Ver: Enllaz al catálogu de mecanismos de Cornell)
A partir de 1970, cola progresiva xeneralización de les teunoloxíes dixitales, desenvolviéronse numberoses ferramientes de diseñu asistíu por ordenador (Autodesk Inventor, SolidWorks, Pro/ENGINEER, CATIA y Solid Edge tán ente les de mayor espardimientu) qu'incluyen nes sos rutines la modelización de distintos mecanismos, permitiendo ver de forma virtual el comportamientu cinemáticu de los dispositivos diseñaos.
Analís mecánicu

_puits_avec_levier.jpg.webp)
A pesar de que cada tipu de máquina cenciella funciona d'una manera distinta dende'l puntu de vista mecánicu, dende'l puntu de vista analíticu toes ríxense poles mesmes ecuaciones matemátiques.[22] Siendo esto verdadero, dende'l puntu de vista teóricu puede analizase'l so funcionamientu de dos maneres distintes: ensin considerar el rozamientu (máquines ideales) y considerándola (máquines reales).
Tamién s'analiza'l funcionamientu de les máquines compuestes, como montaxes de series de máquines cencielles.
Máquines ideales
Cuando nun se considera l'efeutu de les perdes por rozamientu sobre'l funcionamientu d'una máquina simple, entós tamos falando de máquines ideales".
Una fuercia aplícase al dispositivu nun momentu dau, y realiza un trabayu al mover una carga n'otru puntu.[23] Anque delles máquines solo camuden la direición de la fuercia, tal como fai una polea simple, la mayoría de les máquines multipliquen la magnitú de la fuercia por un factor, la ventaya mecánica



que puede calculase a partir de la xeometría (y nel so casu, del rozamientu) de la máquina.
Les máquines cencielles nun tienen una fonte propia d'enerxía (al aviesu que los motores),[24] polo que nun pueden realizar más trabayu mecánicu que'l que reciben por aciu de la fuercia aplicada.[23] Una máquina cenciella na que puedan despreciase los efeutos del rozamientu y de la elasticidá de los materiales, denomínase una máquina ideal.[25][26][27] Por causa del principiu de caltenimientu de la enerxía,[28] nuna máquina cenciella ideal, la potencia producida (tasa de producción d'enerxía) ye igual a la potencia aplicada en cualquier momentu:



La potencia de salida ye igual a la velocidá de la carga multiplicada pola fuercia resistente de la carga . De la mesma manera, la potencia d'entrada ye igual a la velocidá de la fuercia aplicada multiplicada pol valor de la mesma fuercia aplicada .




Poro,

Arriendes d'ello, la ventaya mecánica d'una máquina ideal ye igual a la rellación de velocidaes ente la velocidá de la fuercia aplicada y la velocidá con que se mueve la carga:

La rellación de velocidá de la máquina ye tamién igual a la rellación ente les distancies percorríes polos puntos de la carga y los puntos de la fuercia aplicada:

y puede calculase a partir de la xeometría de la máquina. Por casu, la rellación de velocidá de la lleva ye igual a la rellación ente los llargores de los sos brazos.
La ventaya mecánica pue ser mayor o menor qu'uno:
- Si la fuercia resultante ye mayor que l'aplicada, y entós la máquina actúa como un amplificador de fuercia, pero la distancia percorrida pola carga ye menor que la distancia percorrida pola fuercia aplicada .
- Si la fuercia resultante ye menor que la aplicada, pero la distancia a la que la carga se mueve ye mayor que la distancia percorrida pola fuercia aplicada .





Nun torniellu, nel que s'usa un movimientu de xiru, la fuercia aplicada tien de reemplazase pol momentu torsor, y la so velocidá pola velocidá angular cola que'l torniellu se xira.
Máquines reales. Eficiencia
Toles máquines reales tienen esfregadura, lo que fai que parte de la potencia aplicada se pierda en forma de calor. Si ye la potencia perdida pol resfregón, a partir del principiu de caltenimientu de la enerxía deduzse que


La eficiencia d'una máquina ye un númberu ente 0 y 1 que se define como la rellación ente la potencia aplicada y la potencia resultante, siendo una midida de les perdes d'enerxía



Como enantes, la potencia ye igual al productu de la fuercia pola velocidá, y entós

Poro,

Asina, nes máquines non ideales, la ventaya mecánica ye siempres igual o menor que la rellación de velocidá multiplicada pola eficiencia η, de manera que una máquina na que se considere'l resfregón, nun va ser capaz de mover una carga tan grande como la máquina ideal correspondiente usando la mesma fuercia d'aicionamientu.
Máquines compuestes
Una máquina compuesta ye un dispositivu mecánicu formáu a partir d'un conxuntu de máquines cencielles coneutaes en serie, de forma que la fuercia resultante d'una apurre la fuercia aplicada na siguiente. Por casu, un torniellu de bancu consiste nuna palanca (el mangu de la prensa del torniellu) coneutada en serie con un torniellu, y un reductor de velocidá consiste nun conxuntu d'exes y engranaxes (funcionando mecánicamente como si fueren tornos) coneutaos en serie.
La ventaya mecánica d'una máquina compuesta ye la rellación ente la fuercia resultante exercida pola última máquina de la serie, dividida pola fuercia aplicada a la primera máquina, que ye

Por cuenta de que la fuercia resultante de cada máquina ye l'aplicada na siguiente, , la ventaya mecánica tamién vien dada por


Poro, la ventaya mecánica de la máquina compuesta ye igual al productu de les ventayes mecániques de la serie de máquines simples que la formen

De la mesma, la eficiencia d'una máquina compuesta ye tamién el productu de los rendimientos de la serie de máquines cencielles que la formen

Máquines reversibles y irreversibles

En munches máquines cencielles, si la fuercia resistente de la carga Fr qu'opera na máquina ye grande abondo en rellación cola fuercia aplicada Fa, entós la máquina muévese escontra atrás, cola fuercia resistente de la carga realizando un trabayu mecánicu contra la fuercia aplicada (por casu, como cuando se fai baxar una carga por aciu un tornu).[29] Poro, estes máquines pueden utilizase nos dos sentíos, cola fuercia de accionamientu aplicada a cualquiera de los dos estremos del dispositivu. Por casu, si la fuercia de la carga sobre una palanca ye lo bastante alta, la palanca muévese p'atrás, moviendo l'otru brazu en direición contraria a la de la fuercia aplicada. Estes son les llamaes "máquines reversibles ", denominándose'l movimientu escontra atrás "reacondicionamientu". Sicasí, en dellos tipos de máquines, si les fuercies de resfregón son lo bastante altes, nenguna cantidá de fuercia de carga puede moveles escontra atrás, inclusive si la fuercia aplicao ye cero. Estos dispositivos llámense "máquines irreversibles" o "autoblocantes".[29] Estes máquines solo pueden ser puestes en movimientu pola fuercia aplicada, y cuando esta fuercia cesa, la máquina queda inmóvil, "bloquiada" pol resfregón en cualquier posición na que quede.
L'auto-bloquéu produzse principalmente nes máquines con grandes superficies de contautu ente les partes que se mueven por eslizamientu: el torniellu, el planu inclináu y la cuña:
- L'exemplu más común ye'l torniellu. Na mayoría de los torniellos, l'aplicación d'un par torsor a la exa puede faelo xirar, trabayando axialmente en sentíu contrariu a una carga, pero nenguna cantidá de carga axial contra la exa va faer que xire escontra tras.
- Nun planu inclináu, una carga puede alzase abasnando sobre'l planu pola aplicación d'una fuercia llateral, pero si'l planu nun ye demasiáu pindiu y hai abondu resfregón ente la carga y el planu, cuando la fuercia aplicao cesa, la carga quedará inmóvil y nun se va esmucir escontra baxo del planu, independientemente del so pesu.
- Una cuña puede introducise nun bloque de madera aplicando una fuercia nel so estremu romu (cutiéndola con un mazu, por casu) obligando a separase los dos llaos de la madera, pero nenguna cantidá de fuercia de compresión de la madera sobre la cuña va faer que salte de nuevo fuera del bloque.
Una máquina será irreversible si y solu si la so eficiencia η ta per baxo del 50%:[29]

Qu'una máquina sía irreversible (o autoblocante) depende tanto de les fuercies de resfregón (coeficiente de rozamientu) ente los sos partes, como de la rellación de distancia da / dr (ventaya mecánica ideal). Si la combinación del resfregón y de la ventaya mecánica ideal ye lo bastante alta, la máquina va ser irreversible.
Demostración
Cuando una máquina se mueve na direición de meyora del puntu 1 al puntu 2, cola fuercia aplicada trabayando contra la fuercia resistente de la carga, pol principiu de caltenimientu d'enerxía[30][31] tiense que'l trabayu aplicáu ye igual a la suma del trabayu realizáu sobre la fuercia de carga y al trabayu perdíu por cuenta del resfregón




Si la eficiencia ta per baxo del 50%


De 1)


Cuando la máquina se mueve p'atrás del puntu 2 al puntu 1, la fuercia de carga fai el trabayu sobre la fuercia d'entrada, siendo'l trabayu perdíu por cuenta del resfregón el mesmu

Y poro, el trabayu de salida ye

{\displaystyle W_{\text{fric}}\,} Arriendes d'ello, les máquines irreversibles sonlo, porque'l trabayu que s'estena por cuenta del resfregón ye mayor que'l trabayu realizáu pola fuercia de carga intentando mover la máquina escontra atrás, inclusive ensin una fuercia aplicada.
Teoría de máquines moderna
Cadenes cinemátiques

Les máquines simples son exemplos elementales de cadenes cinemátiques que s'utilicen pa modelizar máquines que van dende la máquina de vapor a los robots remanadores. Los rulemanes que formen el puntu de sofitu d'una palanca y que permiten xirar a ruedes y polees sobre les sos exes son exemplos de pares cinemáticos, formando una xunta articulada. De la mesma, la superficie d'un planu inclináu y la cuña son exemplos d'un par cinemáticu denomináu xunta esnidiosa. El torniellu identifícase xeneralmente como un tipu propiu de par cinemáticu, denomináu xunión helicoidal.
Dos palanques o rabiles, combínense nun mecanismu de cuatro barres planu, xuniendo un enllaz que coneuta la salida d'un rabil cola entrada d'otru. Enllaces adicionales pueden conectase pa formar un simple mecanismu de seis barres, o en combinaciones tan complexes como les necesaries pa diseñar un robot.[26]
Clasificación de les máquines

La identificación de les máquines cencielles surde del deséu de disponer d'un métodu sistemáticu pa inventar nueves máquines. Poro, un oxetivu importante ye conocer cómo les máquines simples combínense pa formar máquines más complexes. Un enfoque consiste n'axuntar máquines cencielles en serie pa llograr máquines compuestes.
Sicasí, un planteamientu más granible foi escurríu por Franz Reuleaux, que recoyó y estudió más de 800 máquines elementales. Diose cuenta de que la palanca; la polea; y la rueda y l'exa; son, n'esencia, el mesmu dispositivu: un cuerpu que xira alredor d'una articulación. De la mesma, el planu inclináu, la cuña, y el torniellu, faen esmucir un bloque sobre la superficie d'un planu.[32]
Esta idea amuesa que son les articulaciones o les conexones les qu'apurren el movimientu al sistema mecánicu, y que polo tanto son los elementos principales de les máquines. A partir de cuatro tipos d'articulaciones mecániques (l'articulación cilíndrica, la rótula esnidiosa, la rótula fixa y la rótula esférica) y de les conexones rellacionaes tales como cables y cintes, ye posible entender una máquina como un conxuntu de partes sólides coneutaes por estos tipos de xuntes.[26]
Anguaño, bastantes aplicaciones de diseñu asistíu por ordenador permiten modelizar mecanismos complexos de forma virtual, lo que facilita l'analís del so funcionamientu, evitando la necesidá de fabricar prototipos en taller pa la so evaluación previa.[33]
Ver tamién
Enllaces esternos
Referencies
- ↑ Chambers, Ephraim (1728), «Table of Mechanicks», Cyclopædia, A Useful Dictionary of Arts and Sciences (London, England), Volume 2: 528, Plate 11Chambers, Ephraim, «Table of Mechanicks», Cyclopædia, A Useful Dictionary of Arts and Sciences (London, England) Volume 2: p. 528, Plate 11.
- ↑ Google books
- ↑ Paul, Akshoy; Roy, Pijush; Mukherjee, Sanchayan (2005), Mechanical sciences: engineering mechanics and strength of materials, Prentice Hall of India, p. 215, ISBN 81-203-2611-3.Paul, Akshoy; Roy, Pijush; Mukherjee, Sanchayan, Mechanical sciences: engineering mechanics and strength of materials, Prentice Hall of India, p. 215, ISBN 81-203-2611-3.
- 1 2 3 Asimov, Isaac (1988), Understanding Physics, New York, New York, USA: Barnes & Noble, p. 88, ISBN 0-88029-251-2.Asimov, Isaac, Understanding Physics, New York, New York, USA: Barnes & Noble, p. 88, ISBN 0-88029-251-2, https://books.google.com/books?id=pSKvaLV6zkcC&pg=PA88&dq=Asimov+simple+machine&cd=1#v=onepage&q&f=false.
- ↑ Anderson, William Ballantyne (1914). McGraw Hill: Physics for Technical Students: Mechanics and Heat. Consultáu'l 11 de mayu de 2008.
- ↑ CEJAROSU (2005). «MecanESO» (castellanu). Consultáu'l 25 de setiembre de 2016.
- ↑ «Understanding the five most Important Simple Machines» (inglés). Consultáu'l 25 de setiembre de 2016.
- 1 2 Compound machines, University of Virginia Physics Department, http://galileo.phys.virginia.edu/outreach/8thgradesol/compoundmachine.htm, consultáu'l 11 de xunu de 2010.
- 1 2 Usher, Abbott Payson (1988). Courier Dover Publications: A History of Mechanical Inventions. ISBN 0-486-25593-X.
- ↑ Wallenstein, Andrew (June 2002). «Foundations of cognitive support: Toward abstract patterns of usefulness». Springer. p. 136.
- 1 2 Prater, Edward L., Basic machines, U.S. Navy Naval Education and Training Professional Development and Technology Center, NAVEDTRA 14037, http://www.constructionknowledge.net/public_domain_documents/Div_1_General/Basic_Skills/Basic%20Machines%20NAVEDTRA%2014037%201994.pdf.
- 1 2 Chiu, Y. C., An introduction to the History of Project Management, Delft: Eburon Academic Publishers, pp. 42, ISBN 90-5972-437-2, https://books.google.com/books?id=osNrPO3ivZoC&pg=PA42&dq=%22heron+of+alexandria%22++load+motion#v=onepage&q=%22heron%20of%20alexandria%22%20%20load%20motion&f=false
- ↑ Ostdiek, Vern (2005). Thompson Brooks/Cole: Inquiry into Physics. ISBN 0-534-49168-5. Consultáu'l 22 de mayu de 2008.
- ↑ Citáu por Pappus d'Alexandría na so obra Sinagoga, Llibru VIII
- ↑ Strizhak, Viktor; Igor Penkov; Toivo Pappel. «Evolution of design, use, and strength calculations of screw threads and threaded joints». Kluwer Academic publishers. p. 245. ISBN 1-4020-2203-4.
- 1 2 Krebs, Robert E. (2004). Greenwood Publishing Group: Groundbreaking Experiments, Inventions, and Discoveries of the Middle Ages. ISBN 0-313-32433-6. Consultáu'l 21 de mayu de 2008.
- ↑ Stephen, Donald (2001). W. W. Norton & Company: Wheels, clocks, and rockets: a history of technology. ISBN 0-393-32175-4.
- ↑ Armstrong-Hélouvry, Brian (1991). Springer: Control of machines with friction. ISBN 0-7923-9133-0.
- ↑ Reuleaux, F., The kinematics of machinery (translated and annotated by A.B.W. Kennedy), New York, New York, USA: reprinted by Dover.
- ↑ Cornell University, Reuleaux Collection of Mechanisms and Machines at Cornell University, Cornell University, http://kmoddl.library.cornell.edu/rx_collection.php.
- ↑ Esta idea fundamental era el tema principal de la obra de Galileo Galilei de 1600 titulada Le Meccaniche
- 1 2 Bhatnagar, V. P. (1996). Pitambar Publishing: A Complete Course in Certificate Physics. ISBN 8120908686.
- ↑ Simmons, Ron (2008). Milliken Publishing: Discover! Work & Machines. ISBN 1429109475.
- ↑ Gujral, I.S. (2005). Firewall Media: Engineering Mechanics. ISBN 8170086361.
- 1 2 3 Uicker, Jr., John J.; Pennock, Gordon R.; Shigley, Joseph E., Theory of Machines and Mechanisms (third edición), New York: Oxford University Press, ISBN 978-0-19-515598-3
- ↑ Paul, Burton, Kinematics and Dynamics of Planar Machinery, Prentice Hall, ISBN 978-0-13-516062-6
- ↑ Paul Allen Tipler (1991). Física preuniversitaria, 1 (en castellanu), Editorial Reverte, páx. 1154. ISBN 9788429143751.
- 1 2 3 Gujral, I.S. (2005). Firewall Media: Engineering Mechanics. ISBN 81-7008-636-1.
- ↑ Rao, S. (2005). Universities Press: Engineering Mechanics. ISBN 81-7371-543-2.
- ↑ Goyal, M. C. (2009). PHI Learning Private Ltd.: Engineering Mechanics. ISBN 81-203-3789-1.
- ↑ Hartenberg, R.S. & J. Denavit (1964) Kinematic synthesis of linkages, New York: McGraw-Hill, online link from Cornell University.
- ↑ «Animated Mechanisms». Consultáu'l 26 de setiembre de 2016. Exemplos d'animaciones de mecanismos diitales.
| Control d'autoridaes |
|
|---|
 Datos: Q186713
Datos: Q186713 Multimedia: Simple machines
Multimedia: Simple machines