نموذج الكاميرا ذات الثقب
يصف نموذج الكاميرا ذات الثقب pinhole camera model العلاقة الرياضية بين إحداثيات نقطة في الفضاء ثلاثي الأبعاد وإسقاطها على مستوى الصورة للكاميرا ذات الثقب المثالي (ثقب صغير)، حيث يتم وصف فتحة الكاميرا كنقطة ولا تستخدام العدسات لتركيز الضوء. لا يتضمن النموذج ، على سبيل المثال ، التشوهات الهندسية أو ضبابية الكائنات غير المركزة التي تسببها العدسات وفتحات العدسة ذات الحجم المحدود. كما أنه لا يأخذ في الاعتبار أن معظم الكاميرات العملية لها إحداثيات صور منفصلة فقط. هذا يعني أنه لا يمكن استخدام نموذج الكاميرا ذات الثقب إلا كتقريب من الدرجة الأولى للتعيين من مشهد ثلاثي الأبعاد إلى صورة ثنائية الأبعاد . تعتمد صلاحيتها على جودة الكاميرا وينخفض تباين الصورة بشكل عام من مركز الصورة إلى الحواف مع زيادة تأثيرات تشوه العدسة.

يمكن تعويض بعض التأثيرات التي لا يأخذها نموذج الكاميرا ذات الثقب في الاعتبار بتطبيق تحويلات إحداثيات مناسبة على إحداثيات الصورة ؛ التأثيرات الأخرى صغيرة بما يكفي لإهمالها في حالة استخدام كاميرا عالية الجودة. هذا يعني أنه غالبًا ما يمكن استخدام نموذج الكاميرا ذات الثقب كوصف معقول لكيفية تصوير الكاميرا لمشهد ثلاثي الأبعاد ، على سبيل المثال في رؤية الكمبيوتر ورسومات الكمبيوتر .
الهندسة

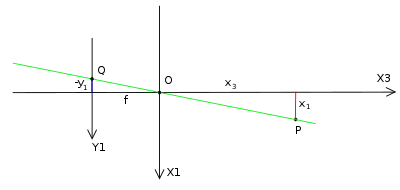
يوضح الشكل الهندسة المتعلقة برسم خرائط للكاميرا ذات الثقب. يحتوي الشكل على العناصر الأساسية التالية:
- نظام إحداثيات متعامد ثلاثي الأبعاد أصله عند النقطة O. فهذا هو المكان الذي توجد فيه <i id="mwJw">فتحة الكاميرا</i> . يشار إلى المحاور الثلاثة لنظام الإحداثيات بـ X1 و X2 و X3. يشير المحور X3 إلى اتجاه رؤية الكاميرا ويشار إليه بالمحور البصري أو المحور الرئيسي أو الشعاع الرئيسي . المستوى الذي يمتد بواسطة المحورين X1 و X2 هو الجانب الأمامي للكاميرا ، أو المستوى الرئيسي .
- مستوى صورة هو المستوى الذي يتم فيه عرض الشكل ثلاثي الأبعاد من خلال فتحة الكاميرا. مستوى الصورة موازي للمحور X1 و X2 ويقع على مسافة من الأصل O في الاتجاه السلبي لمحور X3 ، حيث f هي البعد البؤري للكاميرا ذات الثقب. يعني التنفيذ العملي للكاميرا ذات الثقب أن مستوى الصورة موجود بحيث يتقاطع مع محور X3 عند الإحداثيات -f حيث f> 0 .
- النقطة R عند تقاطع المحور البصري ومستوى الصورة و يشار إليها بالنقطة الرئيسية [1] أو مركز الصورة .
- النقطة P تتواجد في مكان ما عند تنسيق المحاور بالنسبة إلى المحاور X1 و X2 و X3.
- خط إسقاط النقطة P في الكاميرا. هذا هو الخط الأخضر الذي يمر بالنقطة P والنقطة O.
- إسقاط النقطة P على مستوى الصورة ، يُشار إليه بالرمز Q. تُعطى هذه النقطة من خلال تقاطع الشعاع الساقط (الأخضر) مع مستوى الصورة. عمليا يمكننا أن نفترض أن > 0 مما يعني أن نقطة التقاطع محددة جيدًا.
- يوجد أيضًا نظام إحداثيات ثنائي الأبعاد في مستوى الصورة ، مع الأصل عند R مع المحورين Y1 و Y2 اللذين يتوازيان مع X1 و X2 ، على التوالي. فتكون إحداثيات النقطة Q بالنسبة إلى نظام الإحداثيات هذا هي .




يُفترض أن تكون فتحة الكاميرا ذات الثقب ، ومن الثقب يجب أن تمر جميع الأشعة الساقطة صغيرة جدا فهي تـُعتبر نقطة. يشار إلى هذه النقطة في الفضاء ثلاثي الأبعاد في المنشورات العلمية بالمركز البصري (أو مركز العدسة ) .[2]
الصيغة
بعد ذلك نريد أن نفهم كيف الإحداثيات من النقطة Q تعتمد على الإحداثيات من النقطة P. يمكن القيام بذلك بمساعدة الشكل التالي الذي يُظهر نفس المشهد مثل الشكل السابق ولكن الآن من أعلى ، بالنظر إلى الأسفل في الاتجاه السلبي لمحور X2.
في هذا الشكل نرى مثلثين متشابهين وكلاهما يحتوي على أجزاء من الشعاع الساقط (أخضر) مثل الوتر . ضلع المثلث الأيسر هي و f و ضلع المثلث القائم و . بما أن المثلثين متشابهان ، فنجد أن :


- أو


يعطي تحقيق مماثل ببحث في الاتجاه السلبي لمحور X1 المعادلة:
- أو


يمكن تلخيص هذا على أن :

وهو تعبير يصف العلاقة بين الإحداثيات ثلاثية الأبعاد للنقطة P وإحداثيات صورتها عند النقطة Q في مستوى الصورة.
الصورة ببعد تدويرها ومستوى الصورة التخيلية
الانتقال من الإحداثيات ثلاثية الأبعاد إلى الإحداثيات ثنائية الأبعاد الموصوفة للكاميرا ذات الثقب يجري بإسقاط منظور متبوعًا باستدارة 180 درجة في مستوى الصورة. هذا يتوافق مع كيفية عمل الكاميرا الحقيقية ذات الثقب ؛ فالصورة الناتجة تكون مقلوبة 180 درجة ويعتمد حجم الشيء المصور على المسافة التي بينه و بين النقطة المحورية ويعتمد حجم الصورة على المسافة f بين مستوى الصورة والنقطة البؤرية. ومن أجل إنتاج صورة غير مقلوبة فهناك احتمالان:
- أن نقوم بتدوير نظام الإحداثيات في مستوى الصورة 180 درجة (في أي اتجاه). هذه هي الطريقة التي يمكن بها لأي تطبيق عملي للكاميرا ذات الثقب أن يحل المشكلة ؛ بالنسبة لكاميرا التصوير الفوتوغرافي ، نقوم بتدوير الصورة قبل النظر إليها ، وبالنسبة للكاميرا الرقمية ، نقرأ وحدات البكسل بالترتيب بحيث يتم تدويرها.
- أو نضع مستوى الصورة بحيث يتقاطع مع المحور X3 عند f بدلاً من -f ونعيد إجراء الحسابات السابقة. سيؤدي ذلك إلى إنشاء مستوى صورة افتراضي (أو أمامي) لا يمكن تنفيذه عمليًا ، ولكنه يوفر كاميرا نظرية قد يكون تحليلها أبسط من الكاميرا الحقيقية.
في كلتا الحالتين يُعطى التعيين الناتج من الإحداثيات ثلاثية الأبعاد إلى إحداثيات الصورة ثنائية الأبعاد من خلال التعبير أعلاه ، ولكن بدون علامة الناقص (-) ، وبالتالي نحصل على.

بالإحداثيات المتجانسة
يمكن أيضًا تمثيل الانتقال من إحداثيات ثلاثية الأبعاد للنقاط في الفضاء إلى إحداثيات صورة ثنائية الأبعاد في إحداثيات متجانسة . نعتبر تمثل نقطة ثلاثية الأبعاد في إحداثيات متجانسة (متجه رباعي الأبعاد) ، ونفترض أن تكون لصورة هذه النقطة في الكاميرا ذات الثقب (ناقل ثلاثي الأبعاد). نصل إلى العلاقة التالية :



حيث هي مصفوفة الكاميرا 3x4 والعلامة يتني المساواة بين عناصر المساحات الإسقاطية . هذا يعني أن الجانبين الأيمن والأيسر متساويان في الضرب القياسي غير الصفري. نتيجة لهذه العلاقة هو أن يمكن رؤيتها كعنصر من عناصر الفضاء الإسقاطي ؛ مصفوفتي الكاميرا تكون متكافئتين إذا كانتا متساويتي الجدوى . هذا الوصف لرسم خرائط الكاميرا ذات الثقب ، كتحول خطي بدلاً من أن يكونا تعبيرين خطيين . هذا يجعل من الممكن تبسيط العديد من اشتقاقات العلاقات بين إحداثيات ثلاثية الأبعاد وثنائية الأبعاد.


أنظر أيضا
- استئصال الكاميرا
- معادلة العلاقة الخطية المتداخلة
- بعد المدخل ، الموقع المكافئ للثقب بالنسبة لبعد الشخص الواقف أمام الكاميرا .
- بعد الخروج ، الموقع المكافئ للثقب بالنسبة لمستوى الصورة في كاميرا حقيقية.
- ابن الهيثم
- الكاميرا ذات الثقب ، التطبيق العملي للنموذج الرياضي الموصوف في هذه المقالة.
- عدسة مستقيمة
المراجع
- Carlo Tomasi (9 أغسطس 2016). "A Simple Camera Model" (PDF). cs.duke.edu. مؤرشف من الأصل (PDF) في 2023-01-19. اطلع عليه بتاريخ 2021-02-18.
- Andrea Fusiello (27 ديسمبر 2005). "Elements of Geometric Computer Vision". Homepages.inf.ed.ac.uk. مؤرشف من الأصل في 2023-11-21. اطلع عليه بتاريخ 2013-12-18.
فهرس كتب
- David A. Forsyth and Jean Ponce (2003). Computer Vision, A Modern Approach. Prentice Hall. ISBN:0-12-379777-2.
- Richard Hartley and Andrew Zisserman (2003). Multiple View Geometry in computer vision. Cambridge University Press. ISBN:0-521-54051-8. مؤرشف من الأصل في 2023-01-19.
- Bernd Jähne (1997). Practical Handbook on Image Processing for Scientific Applications. CRC Press. ISBN:0-8493-8906-2.
- Linda G. Shapiro and George C. Stockman (2001). Computer Vision. Prentice Hall. ISBN:0-13-030796-3.
{{استشهاد بكتاب}}: صيانة الاستشهاد: أسماء عددية: قائمة المؤلفين (link) صيانة الاستشهاد: أسماء متعددة: قائمة المؤلفين (link) - Gang Xu and Zhengyou Zhang (1996). Epipolar geometry in Stereo, Motion and Object Recognition. Kluwer Academic Publishers. ISBN:0-7923-4199-6. مؤرشف من الأصل في 2023-01-19.
 بوابة هندسة رياضية
بوابة هندسة رياضية