رادار فوق الأفق
رادار فوق الأفق (OTH)، الذي يُطلق عليه أحيانًا ما وراء الأفق (BTH)، هو نوع من أنظمة الرادار التي لها القدرة على اكتشاف الأهداف في نطاقات بعيدة جدًا، عادةً ما بين مئات إلى آلاف الكيلومترات، وراء أفق الرادار، وهو حد المسافة للرادار العادي. تم نشر العديد من أنظمة رادار مافوق الأفق (OTH) بدءًا من الخمسينيات والستينيات من القرن الماضي كجزء من أنظمة رادار الإنذار المبكر، ولكن تم استبدالها عمومًا بأنظمة الإنذار المبكر المحمولة جواً. عادت رادارات ماوراء الأفق مؤخرًا، حيث أصبحت الحاجة إلى تتبع دقيق بعيد المدى أقل أهمية مع انتهاء الحرب الباردة، وأخذت الرادارات الأرضية الأقل تكلفة في الاعتبار مرة أخرى لأدوار مثل الاستطلاع البحري ومكافحة المخدرات.

تكنولوجيا
ينتقل تردد موجات الراديو التي تستخدمها معظم الرادارات، على شكل موجات ميكروية، في خطوط مستقيمة. يحد هذا من نطاق اكتشاف أنظمة الرادار للأشياء الموجودة في أفقها (يشار إليه عمومًا باسم «خط الرؤية» حيث يجب أن تكون الطائرة على الأقل مرئية من الناحية النظرية للشخص في موقع جهاز إرسال الرادار وارتفاعه) بسبب انحناء الأرض. على سبيل المثال، رادار مُركب فوق 10 متر (33 قدم) سيكون له مدى يصل إلى الأفق في حوالي 13 كيلومتر (8.1 ميل) ، مع مراعاة تأثيرات الانكسار في الغلاف الجوي. إذا كان الهدف فوق السطح، فسيزيد نطاق الرادار بناءً على ذلك، فهدف على ارتفاع 10 متر (33 قدم) سيمكن اكتشافة بواسطة نفس الرادار من بعد26 كيلومتر (16 ميل) . يمكن أن يؤدي وضع الهوائي على جبل عالٍ إلى زيادة النطاق إلى حد ما؛ ولكن، بشكل عام، من غير العملي بناء أنظمة رادار ذات مدى خط رؤية يتجاوز بضع مئات من الكيلومترات. [1]
تستخدم رادارات فوق الأفق تقنيات مختلفة لرؤية ما وراء هذا الحد. يتم استخدام طريقتين الأكثر شيوعًا؛ أنظمة الموجات القصيرة التي تنكسر إشاراتها على الغلاف الأيوني لكشف بعيد المدى للغاية، [1] وأنظمة الموجات السطحية، التي تستخدم موجات راديو منخفضة التردد [2] والتي، بسبب الحيود، تتبع انحناء الأرض لتصل إلى ما وراء الأفق. تحقق هذه الأنظمة نطاقات كشف تصل إلى مئات الكيلومترات مقارنة بمنشآت الرادار التقليدية الصغيرة.

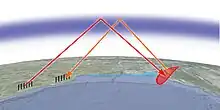
يستخدم النوع الأكثر شيوعًا من رادارات فوق الأفق (OTH) الموجات السماوية أو «التخطي»، حيث تنكسر الموجات الراديوية القصيرة علىالطبقة الأيوني في الغلاف الجوي للأرض، الغلاف المتأين. ونظرًا لظروف معينة في الغلاف الجوي، فإن الإشارات الراديوية المرسلة بزاوية محددة في السماء سوف تنكسر باتجاه الأرض بواسطة الطبقة الأيونية، مما يسمح لها بالعودة إلى الأرض وراء الأفق. سترتد كمية صغيرة من هذه الإشارة عن الأهداف المحدد في اتجاه السماء، وتنكسر على الطبقة الايونية مرة أخرى، وتعود إلى هوائي الاستقبال بنفس المسار. يُظهر نطاق واحد فقط من الترددات الراديوية هذا السلوك بانتظام: التردد العالي (HF) أو جزء الموجة القصيرة من الطيف من 3 إلى 30 ميغا هيرتز. يعتمد أفضل تردد للاستخدام على الظروف الحالية للغلاف الجوي ودورة البقع الشمسية. لهذه الأسباب، تعمل الأنظمة التي تستخدم الموجات السماوية عادةً على مراقبة مستمرة لاستقبال الإشارات المرتدة من أجل ضبط تردد الإشارة باستمرار. [1]
تعتمد دقة أي رادار على عرض الشعاع ومدى الهدف. على سبيل المثال؛ رادار ذو نطاق بث بدرجة واحدة والهدف عند 120 كيلومتر (75 ميل) النطاق سيظهر الهدف على أنه بسعة 2 كيلومتر (1.2 ميل) . لإنتاج شعاع بدرجة واحدة على الترددات الأكثر شيوعًا، هوائي بسعة 1.5 كيلومتر (0.93 ميل) سيكون مطلوبًا. نظرًا لفيزياء عملية الانكسار، تكون الدقة الفعلية أقل، مع ان رادار ذو وضوح نطاق يتراوح بين 20 إلى 40 كيلومتر (12-25 ميل) ودقة توجية بين 2 إلى 4 كيلومتر يكون مقترحًا. فحتى ذو دقة تصل إلى 2 كيلومتر سيكون مفيد للإنذار المبكر فقط، وليس لاستخدام وتوجية الأسلحة. [1]
مشكلة أخرى هي أن عملية الانكسار تعتمد بشكل كبير على الزاوية بين الإشارة والغلاف الأيوني، وتقتصر عمومًا على حوالي 2-4 درجات من الأفق المحلي. يتطلب صنع شعاع في هذه الزاوية بشكل عام صفوف هوائيات هائلة وأرضية عاكسة للغاية على طول المسار الذي يتم إرسال الإشارة منه، وغالبًا ما يتم تعزيزها عن طريق تركيب حصائر شبكية سلكية تمتد حتى 3 كيلومتر (1.9 ميل) أمام الهوائي. [1] وبالتالي فإن بناء أنظمة رادارات فوق الافق باهظ الثمن وغير متحرك في الأساس.
بالنظر إلى التشتت في كل انكسار، فإن عائدات الإشارة صغيرة للغاية، وهذا أحد الأسباب التي جعلت رادارات فوق الافق (OTH) غير عملية حتى الستينيات، عندما تم تصميم مضخمات منخفضة الضوضاء لأول مرة. نظرًا لأن الإشارة المنكسرة من الأرض أو البحر ستكون كبيرة جدًا مقارنة بالإشارة المنكسرة من «الهدف»، يجب استخدام بعض الأنظمة لتمييز الأهداف عن ضوضاء الخلفية. أسهل طريقة للقيام بذلك هي استخدام تأثير دوبلر، والذي يستخدم إزاحة التردد الناتجة عن تحرك الأجسام لقياس سرعتها. من خلال تصفية جميع الإشارات العائدة القريبة من التردد الأصلي المرسل، تصبح الأهداف المتحركة مرئية. يمكن رؤية أي قدر ضئيل من الحركة باستخدام هذه العملية، بسرعات منخفضة تصل إلى 1.5 عقدة (2.8 كم/س) . [1]
يستخدم هذا المفهوم الأساسي في جميع الرادارات الحديثة تقريبًا، ولكن في حالة أنظمة OTH يصبح أكثر تعقيدًا بسبب التأثيرات المماثلة الناتجة عن حركة الغلاف الأيوني. استخدمت معظم الأنظمة جهاز إرسال ثانٍ يبث مباشرة في الغلاف الأيوني لقياس حركته وضبط عوائد الرادار الرئيسي آنيًا. يتطلب القيام بذلك استخدام أجهزة الكمبيوتر، وهو سبب آخر جعل أنظمة OTH غير عملية حقًا حتى الستينيات، مع إدخال أنظمة الحالة الصلبة عالية الأداء. [1]
يستخدم النوع الثاني من رادارات فوق الأفق ترددات أقل بكثير في نطاق الموجات الطويلة. يمكن لموجات الراديو عند هذه الترددات أن تنحرف حول العوائق وتتبع انحناء الأرض، وتنتقل إلى ما وراء الأفق. ينعكس الصدى على الهدف ويتبع نفس المسار إلى موقع المرسل. هذه الموجات الأرضية لها أطول مدى فوق البحار. مثل أنظمة الموجات السماوية عالية التردد، فإن الإشارة المستقبلة من أنظمة الموجات الأرضية منخفضة للغاية وتتطلب إلكترونيات شديدة الحساسية. نظرًا لأن هذه الإشارات تنتقل بالقرب من السطح، وتنتج دقة أقل، تُستخدم أنظمة التردد المنخفض عمومًا لتتبع السفن بدلاً من الطائرات. ومع ذلك، فإن استخدام التقنيات الثنائية ومعالجة الكمبيوتر ممكن أن تنتج دقة أعلى، وقد تم استخدامها في بداية التسعينيات.
تاريخ
من المعروف أن المهندسين في الاتحاد السوفيتي قد طوروا ما يبدو أنه أول نظام تشغيلي لماوراء الأفق في عام 1949، يسمى "Veyer". ومع ذلك، تتوفر معلومات قليلة عن هذا النظام في المصادر الغربية، ولا توجد تفاصيل معروفة عن تشغيله. من المعلوم أنه لم يتم إجراء أي ابحاث أخرى من قبل الفرق السوفيتية حتى الستينيات والسبعينيات من القرن الماضي. [3]
تم إجراء الكثير من الأبحاث المبكرة حول أنظمة فعالة لرادارات فوق الافق تحت إشراف الدكتور ويليام ثالر (William J. Thaler) في مختبر الأبحاث البحرية. أُطلق على العمل اسم "Project Teepee". نظامهم التجريبي الأول، MUSIC (التخزين والتكامل والارتباط المتعدد)، أصبح جاهزًا للعمل في عام 1955، وكان قادرًا على اكتشاف إطلاق الصواريخ من بعد 600 ميل (970 كـم) في كيب كانافيرال، والانفجارات النووية في نيفادا من على 1,700 ميل (2,700 كـم) . [1] تم بناء نظام محسن بشكل كبير، وهو اختبار للرادار العملي، في عام 1961 تحت اسم MADRE (معدات الرادار ذات الذاكرة الطبلية) في خليج تشيسابيك. رصد طائرات إلى مدى 3,000 كيلومتر (1,900 ميل) باستخدام أقل من 50 كيلو واط من طاقة البث. [3] [N 1]
كما تدل الأسماء، اعتمد كلا النظامين على مقارنة الإشارات المرتجعة المخزنة على ذاكرات طبلية. في محاولة لإزالة الضوضاء من شاشات الرادار، أضافت العديد من أنظمة الرادار في أواخر الحرب وما بعد الحرب خط تأخير صوتي يخزن الإشارة المستقبلة للمدة الزمنية اللازمة بالضبط لوصول نبضة الإشارة التالية. من خلال إضافة الإشارة التي وصلت حديثًا إلى نسخة مقلوبة من الإشارات المخزنة في خط التأخير، تتضمن الإشارة الخارجة التغييرات فقط من نبضة إلى أخرى. أدى هذا إلى إزالة أي انعكاسات ثابتة، مثل التلال القريبة أو الأشياء الأخرى، تاركًا فقط الأجسام المتحركة، مثل الطائرات. سيعمل هذا المفهوم الأساسي مع الرادار بعيد المدى أيضًا، ولكن كانت لديه مشكلة تتمثل في أن خط التأخير يجب أن يكون بحجم ميكانيكي لتردد تكرار النبضات للرادار، أو PRF. للاستخدام بعيد المدى، كان PRF طويلًا جدًا للبدء، وتم تغييره بشكل متعمد من أجل عرض نطاقات مختلفة. بالنسبة لهذا الدور، لم يكن خط التأخير قابلاً للاستخدام، وقدمت الأسطوانة المغناطيسية الحديثة، نظام تأخير متغير ملائم ويمكن التحكم فيه بسهولة.
تم بناء نظام آخر مبكر للموجات القصيرة في أستراليا في أوائل الستينيات. يتكون هذا من عدة هوائيات تم وضعها على بُعد أربعة أطوال موجية، مما يسمح للنظام باستخدام تشكيل شعاع إزاحة الطور لتوجيه اتجاه الحساسية وضبطه لتغطية سنغافورة وكلكتا والمملكة المتحدة. استهلك هذا النظام 25 ميل (40 كـم) من الكابلات الكهربائية في منطقة الهوائي. [1]
المملكة المتحدة/الولايات المتحدة كوبرا ميست
أول تطور تشغيلي حقيقي كان في نظام أنجلو أمريكي معروف باسم كوبرا ميست، والذي بدأ بنائه في أواخر الستينيات. استخدم كوبرا ميست جهاز إرسال هائل ذو قدرة 10 ميجاواط ويمكنه اكتشاف الطائرات المحلقة فوق غرب الاتحاد السوفيتي من موقعه في سوفولك. عندما بدأ اختبار النظام في عام 1972، تسبب مصدر غير متوقع للضوضاء في جعله غير قابل للاستخدام إلى حد كبير. لم يتم تحديد مصدر الضجيج مطلقًا وتم التخلي عن الموقع في عام 1973.[4]
نظام اخر مبكر لكلا الدولتين من نفس الحقبة
- تم الإبلاغ عن تثبيت نظام لرادار ماوراء الافق في قاعدة أكرتوري التابعة لسلاح الجو الملكي البريطاني في قبرص وأوكيناوا.[1] من تصميم شركة شركة راديو أمريكا صُمم لمراقبة اختبارات الصواريخ الباليستية في المناطق الداخلية من الاتحاد السوفياتي، ثُبت في منطقة القاعدة ذات السيادة الغربية (أكروتيري), قبرص.[5] المصدر هو «وثائق رفعت عنها السرية في الولايات المتحدة». تم تثبيتة في حوالي عام 1964 ؛ لا تفاصيل حول متى/ أو إذا كان سرح من الخدمة.
- نظام رادار Sugar Tree.

حقق مختبر روما التابع للقوات الجوية الأمريكية أول نجاح كامل مع نظام رادار فوق الأفق الخاص بهم (AN / FPS-118).[6] تم تركيب نموذج أولي بجهاز إرسال بقدرة 1 ميجاوات وجهاز استقبال منفصل في ولاية ماين، مما يوفر تغطية على قوس 60 درجة ومدى بين 900 و 3300 كم. ثم تم بناء مرفق إرسال دائم في موسكو AFS ، وهي منشأة استقبال في محطة كولومبيا فولز الجوية، ومركز عمليات بينهما في بانجور، مين. يمكن تمديد التغطية بمستقبلات إضافية، مما يوفر تغطية كاملة على قوس 180 درجة (كل جزء 60 درجة يعرف باسم «قطاع»).
حصلت GE Aerospace على عقد تطوير، لتوسيع نظام الساحل الشرقي الحالي بقطاعين إضافيين، مع بناء نظام آخر من ثلاثة قطاعات على الساحل الغربي، ونظام من قطاعين في ألاسكا، ونظام قطاع واحد يواجه الجنوب. في عام 1992، تعاقدت القوات الجوية على تمديد التغطية 15 درجة في اتجاه عقارب الساعة على جنوب قطاعات الساحل الشرقي الثلاثة لتكون قادرة على تغطية الحدود الجنوبية الشرقية للولايات المتحدة. بالإضافة إلى ذلك، تم تمديد النطاق إلى 3,000 ميل (4,800 كـم) ، ماعبر خط الاستواء. تم تشغيل الأنظمة 40 ساعة في الأسبوع في أوقات عشوائية. تم تغذية بيانات الرادار إلى الجمارك الأمريكية/مركز خفر السواحل C3I، في ميامي؛ مركز عمليات فرقة العمل المشتركة 4 ، كي ويست؛ مركز عمليات القيادة الجنوبية للولايات المتحدة، كي ويست؛ ومركز عمليات القيادة الجنوبية الأمريكية، بنما.[6]
مع نهاية الحرب الباردة، لم يكن نفوذ عضوين من أعضاء مجلس الشيوخ من ولاية مين كافياً لإنقاذ العملية وألغيت ألاسكا والمواقع المواجهة للجنوب، وتم إيقاف القطاعين الغربي والشرقي المكتملة حتى الآن ووضعها في حالة «التخزين الدافئ»، مما يسمح باستخدامها مرة أخرى إذا لزم الأمر. بحلول عام 2002، تم تخفيض تصنيف مرافق الساحل الغربي إلى حالة «التخزين البارد»، مما يعني أنه يتم إجراء الحد الأدنى من الصيانة من قبل الجهة القائمة عليها.
بدأ البحث في جدوى إزالة المرافق. بعد فترة من المداخلات العامة والدراسات البيئية، نشرت قيادة القتال الجوي للقوات الجوية الأمريكية في يوليو 2005 «تقييمًا بيئيًا نهائيًا لإزالة المعدات في رادار الانتشار فوق الأفق - مرافق الساحل الغربي».[7] تم اتخاذ قرار نهائي لإزالة جميع معدات الرادار في موقع الإرسال لقطاع الساحل الغربي في محطة كريسماس فالي للقوات الجوية خارج كريسماس فالي ، أوريغون ونقلت إلى موقع الاستقبال بالقرب من توليليك ، كاليفورنيا. تم الانتهاء من هذا العمل بحلول يوليو 2007 مع هدم وإزالة صفائف الهوائيات، ف وترك المباني والأسوار والبنية التحتية للمرافق في كل موقع سليمة.[8]
البحرية الأمريكية

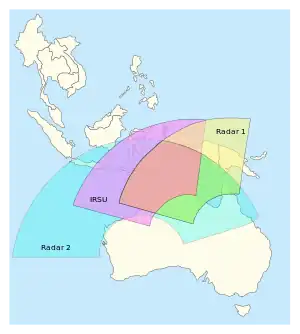
أنشأت البحرية الأمريكية نظامها الخاص، ROTHR AN / TPS-71 (رادار قابل للنقل فوق الأفق)، والذي يغطي منطقة على شكل إسفين تبلغ 64 درجة في نطاقات من 500 إلى 1600 ميل بحري (925 إلى 3000 كم). كان الغرض من ROTHR في الأصل هو مراقبة حركة السفن والطائرات فوق المحيط الهادئ، وبالتالي السماح بتحركات الأسطول المنسقة قبل وقت طويل من الاشتباك. في عام 1991، تم تركيب نموذج أولي لنظام ROTHR في جزيرة ألوشيان المعزولة في أمشيتكا، ألاسكا، لمراقبة الساحل الشرقي لروسيا. ظل قيد الاستخدام حتى عام 1993، وتم نقل المعدات لاحقًا إلى التخزين. تم تثبيت أنظمة الإنتاج الأولى في موقع الاختبار في فرجينيا لاختبار القبول، ولكن تم نقلها بعد ذلك لمواجهة تجارة المخدرات غير المشروعة، التي تغطي أمريكا الوسطى ومنطقة البحر الكاريبي. تم إنشاء الإنتاج الثاني من ROTHR لاحقًا في تكساس، حيث غطى العديد من نفس المناطق في منطقة البحر الكاريبي، ولكنه يوفر أيضًا تغطية على المحيط الهادئ حتى جنوب كولومبيا. كما أنها تعمل في مجال مكافحة الاتجار بالمخدرات. تم تثبيت نظام الإنتاج الثالث والأخير في بورتوريكو، لتوسيع نطاق مراقبة مكافحة المخدرات بعد خط الاستواء، في عمق أمريكا الجنوبية.[بحاجة لمصدر]
الاتحاد السوفياتي / روسيا

بدءًا من الخمسينيات من القرن الماضي، درس الاتحاد السوفيتي أيضًا أنظمة OTH. يبدو أن أول نموذج تجريبي هو Veyer (Hand Fan)، الذي تم بناؤه عام 1949. كان المشروع السوفيتي التالي هو دوغا، الذي بني خارج ميكولايف على ساحل البحر الأسود بالقرب من أوديسا. بهدف الشرق، شُغل دوجا لأول مرة في 7 نوفمبر 1971، واستخدم بنجاح لتتبع إطلاق الصواريخ من الشرق الأقصى والمحيط الهادئ إلى أرض الاختبار في نوفايا زيمليا.
تبع ذلك أول نظام تشغيل Duga-1، المعروف في الغرب باسم Steel Yard، والذي تم بثه لأول مرة في عام 1976. بنيت خارج جوميل، بالقرب من تشيرنوبيل، وكانت موجهة شمالًا وغطت الولايات المتحدة القارية.[بحاجة لمصدر] نبضاته العالية والمتكررة في منتصف نطاقات الراديو على الموجات القصيرة أدت إلى أن يعرفه مشغلو راديو الهواة بأسم «نقار الخشب الروسي» في نهاية المطاف، قام الاتحاد السوفيتي بتغيير الترددات التي استخدموها، حتى دون الاعتراف بأنهم كانوا المصدر، ويرجع ذلك إلى حد كبير إلى تداخله مع بعض الاتصالات جو-أرض بعيدة المدى التي تستخدمها الطائرات التجارية.[بحاجة لمصدر] تم إنشاء نظام ثان بالقرب من كومسومولسك أون أمور في أقصى الشرق الروسي، ويغطي أيضًا الولايات المتحدة القارية وألاسكا.[بحاجة لمصدر]
في أوائل عام 2014، أعلنت روسيا عن نظام جديد، يسمى Container، كان من المفترض أن يرى أكثر من 3000 كم.[9]
Podsolnukh (عباد الشمس) [10] - رادار قصير المدى لمحطة الموجات القصيرة في أفق الساحل. مصمم لاكتشاف الأهداف السطحية والجوية على مسافة 450 كم. مصمم للاستخدام في أنظمة التحكم السطحية والجوية داخل المنطقة الاقتصادية التي يبلغ طولها 200 ميل.[11] يسمح "Sunflower" للمشغلين باكتشاف وتتبع وتصنيف ما يصل إلى 300 من الأجسام البحرية و 100 من الأجسام الجوية خارج الأفق الراديوي تلقائيًا وفي نفس الوقت، وتوفير إحداثياتهم لأنظمة الاستهداف والأسلحة الخاصة بالسفن وأنظمة الدفاع الجوي. اجتاز الرادار اختبارات الدولة في عام 2008. حاليًا، هناك ثلاث محطات تعمل في بحر أوخوتسك وبحر اليابان وبحر قزوين.[12]
أستراليا
ومن الإضافاتلأحدث شبكة Jindalee Operational Radar التي طورتها وزارة الدفاع الأسترالية في عام 1998 واكتملت في عام 2000. يتم تشغيله من قبل وحدة مراقبة الرادار رقم 1 في سلاح الجو الملكي الأسترالي. Jindalee هو نظام رادار متعدد الإستاتيكات (مستقبلات متعددة) يستخدم نظام OTH-B، مما يسمح له بالحصول على قدراتبعيدة المدى وكذلك ضد-التخفي. يبلغ مداها الرسمي 3,000 كيلومتر (1,900 ميل) ، ولكن في عام 1997 كان النموذج الأولي قادرًا على اكتشاف عمليات إطلاق الصواريخ من قبل الصين [13] على مدى 5,500 كيلومتر (3,400 ميل) .
يستخدم (Jindalee)560كيلو واط من طاقة البث مقارنةً ب (OTH-B's) في الولايات المتحدة التي تستهلك 1 ميقا واط، ومع ذلك يقدم نطاقًا أفضل بكثير من نظام الولايات المتحدة في الثمانينيات، نظرًا للتحسن الكبير في الإلكترونيات ومعالجة الإشارات.
كندا
تدرس كندا استخدام رادار الموجات السطحية عالي التردد (HFSWR) لمراقبة المنطقة الاقتصادية الخالصة (EEZ) التي تبلغ 200 ميل بحري لأكثر من 30 عامًا. بدأ البحث في عام 1984 مع إعادة تعيين منارة الملاحة LORAN-A التي تم إيقاف تشغيلها لإجراء التجارب في تتبع الطائرات والسفن والجبال الجليدية.[14] استمرت الأبحاث على مدار العقد التالي وفي عام 1999، قامت كندا بتركيب نظامين لرادار الموجات السطحية عالي التردد SWR503 في كاب ريس ونيوفندلاند.[15] خضعت المواقع لتقييم تقني في عام 2000 ثم تم تحديثها وتقييمها من الناحية التشغيلية في عام 2002.[16] من بين جميع مصادر البيانات التي تم تقييمها، كان رادار الموجات السطحية عالي التردد هو المستشعر الوحيد الذي يقدم تحديثات معلومات في الوقت الفعلي تقريبًا. قدم تقارير متكررة وأظهر بشكل عام تتبعًا موثوقًا للأهداف السطحية في منطقة تغطيته. عندما تم دمج نظام رادار الموجات السطحية عالي التردد مع مصادر البيانات الأخرى، كان هناك تأثير تآزري أدى إلى تحسين الجودة الشاملة لمنظومة الصورة البحرية المعترف بها. علاوة على ذلك، من تحليل احتمالية المساهمة في سيناريوهات تخطيط القوة المتعلقة بالمراقبة، كان من الواضح أن خطة إدارة الصورة البحرية المعترف بها ستنتفع من إضافة رادارات الموجات السطحية عالي التردد كمصدر جديد للبيانات. " تبعت المبيعات الدولية للرادار SWR503 أنظمة تشغيلية مثبتة في آسيا (2008) وأوروبا (2009).[17] في عام 2007، توقف تشغيل الأنظمة الكندية بسبب مخاوف من احتمال حدوث تداخل ضار مع مستخدمي الطيف الراديوي الأساسي.[18] في عام 2010، أدت القدرة الفريدة لـرادار الموجات السطحية عالي التردد على توفير مراقبة منخفضة التكلفة للمنطقة الاقتصادية الخالصة (EEZ) إلى إعادة تقييم التكنولوجيا والتطوير اللاحق للجيل الثالث، نظام رادار الموجات السطحية عالي التردد (الجيل الثالث) استند إلى مبدأ تقنية الإحساس والتكيف التي تجعل التشغيل ممكنًأ على أساس غير مخصص وغير متداخل من خلال استخدام الإدارة الديناميكية للطيف الراديوي تضمنت التطورات الإضافية تحسين أداء النطاق ودقة أفضل في التوجيه وتقليل التتبعات الخاطئة وبدء التتبع في وقت مبكر.[19] في يونيو 2019، تم منح MAEROSPACE ترخيصًا عالميًا لتصميم وتصنيع وتسويق نظام رادارات الموجات السطحية عالي التردد الكندي ومشتقاته دوليًا.[20]
فرنسا
طور الفرنسيون رادار فوق الافق يسمى NOSTRADAMUS خلال التسعينيات [21] (يرمز NOSTRADAMUS إلى نظام Transhorizon Decametric الجدي لتطبيق أساليب الاستوديو)
(بالفرنسية: nouveau système transhorizon décamétrique appliquant les méthodes utilisées en studio).) في مارس 1999، قيل أن رادار OTH NOSTRADAMUS اكتشف طائرتين من طراز Northrop B2 Spirit متجهة إلى كوسوفو. دخل الرادار للخدمة للجيش الفرنسي عام 2005 وما زالت قيد التطوير. يعتمد على مجال هوائي على شكل نجمة، يستخدم في البث والاستقبال (أحادي)، ويمكنه اكتشاف الطائرات على مدى يزيد عن 2000 كيلومتر، في قوس 360 درجة. نطاق التردد المستخدم من 6 إلى 30 ميغا هيرتز.
تم اطلاق مشروع STRADIVARIUS البحثي الفرنسي رسميًا في عام 2009، حيث طور رادارًا جديدًا لما وراء الأفق (رادار الموجة السطحية عالي التردد - HFSWR) قادرًا على مراقبة حركة المرور البحرية حتى 200 ميل بحري بعيدًا عن الشاطئ. تم تشغيل موقع تجريبي [22] منذ يناير 2015 على الساحل الفرنسي للبحر الأبيض المتوسط لعرض قدرات النظام على التشغيل مدار الساعة طوال أيام الأسبوع والذي يتم عرضه الآن للبيع بواسطة DIGINEXT.
الصين
يقال أن عددًا من رادارات OTH-B و OTH-SW تعمل في الصين.[23] ومع ذلك، فإن الإرسال من هذه الرادارات يسبب الكثير من التداخل مع المستخدمين المرخصين الدوليين الآخرين.[24][25]
تم العثور على مجموعة واحدة من الرادارات الصينية OTH-B على خرائط Google لجهاز الإرسال والاستقبال .
البرازيل
رادار OTH 0100 قادر على مراقبة السفن التي تتجاوز MN200 (370 KM) بعيدًا عن الشاطئ، متجاوزًا خط الرؤية المباشر للرادارات التقليدية.[28]
الهند
طورت الهند مجموعة متنوعة من الرادارات طويلة وقصيرة المدى. على الرغم من عدم وجود رادار عملي لما وراء الأفق في الوقت الحالي، إلا أن رادار Swordfish للتتبع طويل المدى الهندي، وهو جزء من نظام الدفاع الصاروخي الهندي ، يبلغ أقصى مدى له 800 كيلومتر، ويتم تحديثه حاليًا لمسافة 1500 كيلومتر.[29][30]
منظمة تطوير الابحاث الدفاعية LRDE تعمل حاليا على وضع نموذج اولي لرادار ما وارء الافق. اكتملت أعمال تصميم النموذج بالفعل ومن المتوقع أن يتم تنفيذ النموذج الأولي حلول أواخر عام 2021. سيحتوي النموذج الأولي على نوعين مختلفين من المصفوفات وسيحدد بنفسه أفضل تردد لاستخدامه في تتبع الكائنات. بعد التجارب الناجحة للنظام الحالي، من المتوقع أن تقوم الهند بتطوير رادار ما وراء الأفق كبير يعتمد على نفس التصميم.[31][32]
نُهج رادارات ما وراء الأفق البديلة
تطبيق شائع آخر لرادار ما وراء الأفق يستخدم الموجات السطحية ، والمعروفة أيضًا باسم الموجات الأرضية. توفر الموجات الأرضية طريقة انتشار إذاعة الموجة المتوسطة AM تحت 1.6 ميغاهيرتز والإرسالات الأخرى بترددات أقل. يعطي انتشار الموجات الأرضية إشارة متحللة بسرعة على مسافات متزايدة من الأرض والعديد من محطات البث المشابهة لها نطاق بث محدود. ومع ذلك ، فإن مياه البحر ، ذات القدرة التوصيلية العالية، تدعم الموجات الأرضية لمسافات تصل إلى 100 كيلومتر (62 ميل) أو أكثر. يستخدم هذا النوع من الرادارت، الموجة السطحية لرادارات ما وراء الأفق، للمراقبة، ويعمل بشكل شائع على تردد بين 4 و 20 ميغا هيرتز. تتمتع الترددات المنخفضة بانتشار أفضل ولكن انعكاس الرادار ضعيف من الأهداف الصغيرة، لذلك عادة ما يكون هناك تردد أمثل يعتمد على نوع الهدف.
هناك طريقة مختلفة للرادار وراء الأفق وهي استخدام الموجات الزاحفة أو الموجات السطحية الكهرومغناطيسية عند ترددات أقل بكثير. الموجات الزاحفة هي التي تتشتت في الجزء الخلفي من جسم ما بسبب الحيود، وهذا هو السبب في أن كلا الأذنين يمكن أن تسمع صوتًا على جانب واحد من الرأس، على سبيل المثال، وكانت الطريقة المبكرة للاتصال والبث الإذاعي. في دور الرادار ، تنحرف الموجات الزاحفة المعنية حول الأرض، على الرغم من صعوبة معالجة الإشارة المرتدة. أصبح تطوير مثل هذه الأنظمة عمليًا في أواخر الثمانينيات بسبب قوة المعالجة المتزايدة بسرعة متاحًأ. تُعرف هذه الأنظمة باسم OTH-SW للموجات الأرضية.
يبدو أن أول نظام OTH-SW تم نشره هو نظام سوفيتي تم وضعه لمراقبة حركة المرور في بحر اليابان. تم مؤخرًا استخدام نظام أحدث للمراقبة الساحلية في كندا، وهو الآن معروض للبيع من قبل Maerospace ، [33] كما نشرت أستراليا أيضًا رادار الموجات السطحية عالي التردد.[34]
ملاحظات
- Laurie states two ranges for MADRE against aircraft, 3000 and 4000 km, on the same page. The former appears to be correct from a comparison with other sources. To add to the confusion, Signals describes MADRE as having an average power of 100 kW and a peak of 5 MW, much more powerful than suggested by Laurie. See Signals, Vol 31, Issue 1, p. 7.
مراجع
- Laurie 1974.
- "Podsolnukh-E over-the-horizon surface-wave radar". مؤرشف من الأصل في 2021-01-08. اطلع عليه بتاريخ 2017-06-08.
- Frissell & Hockersmith 2008.
- Fowle, E.L. Key, R.I. Millar, and R.H. Sear, "The Enigma of the AN/FPS-95 OTH Radar", MITRE Corporation, 1979 نسخة محفوظة 2021-08-05 على موقع واي باك مشين.
- Georgiou، Giorgos (يناير 2012) [Source date needs confirmation]. "British Bases in Cyprus and Signals Intelligence" (PDF). cryptome.org. ص. 4. مؤرشف من الأصل (PDF) في 2021-05-25. اطلع عليه بتاريخ 2018-12-31.
- AN/FPS-118 Over-The-Horizon-Backscatter (OTH-B) Radar نسخة محفوظة 2021-03-12 على موقع واي باك مشين.
- "Final Environmental Assessment for Equipment Removal at Over-the-Horizon Backscatter Radar - West Coast Facilities" نسخة محفوظة 2017-05-10 على موقع واي باك مشين.
- "Photos of the TULELAKE AFS AN/FPS-118 OTH-B RADAR FACILITY". مؤرشف من الأصل في 2011-05-11. اطلع عليه بتاريخ 2008-04-14.
- Russian News - 14 February 2014 نسخة محفوظة 2021-07-21 على موقع واي باك مشين.
- "Coastal over-the-horizon surface wave radar Podsolnukh-E | Catalog Rosoboronexport". مؤرشف من الأصل في 2021-03-03.
- Russian News - 11 March 2012 نسخة محفوظة 2020-05-13 على موقع واي باك مشين.
- Russian News - 31202 نسخة محفوظة 2020-05-13 على موقع واي باك مشين.
- "Electronic Weapons". Strategy Page. StrategyWorld.com. 21 أكتوبر 2004. مؤرشف من الأصل في 2019-01-26. اطلع عليه بتاريخ 2006-11-21.
In 1997, the prototype JORN system demonstrated the ability to detect and monitor missile launches by Chinese off the coast of Taiwan, and to pass that information onto U.S. Navy commanders.
- https://www.researchgate.net/publication/3679572_Groundwave_over-the-horizon_radar_development_at_NORDCO نسخة محفوظة 2021-08-20 على موقع واي باك مشين.
- An integrated maritime surveillance system based on high-frequency surface-wave radars. 2. Operational status and system performance October 2001, IEEE Antennas and Propagation Magazine 43(5):52 - 63
- Review of the Canadian East Coast High Frequency Surface wave Radar program and Compatibility of HF Radar Operations with Communications Users. April 2005, Conference: 8th International Conference on Remote sensing for Maritime and Coastal Environments at: Halifax, NS, Canada
- http://www.deagel.com/news/Romania-Orders-Two-Surface-Radars-to-Monitor-Black-Sea,Dec 11 2008 نسخة محفوظة 2020-12-04 على موقع واي باك مشين.
- Canada's Third Generation High Frequency Surface Wave Radar System, July 2015,Journal of Ocean Technology 10(2):21-28 https://www.researchgate.net/publication/280881938_Canada's_Third_Generation_High_Frequency_Surface_Wave_Radar_System نسخة محفوظة 2021-08-20 على موقع واي باك مشين.
- Spectrum utilization: Sense and adapt: Operation on a noninterferencenon-interference and nonprotected basis, November 2017 IEEE Aerospace and Electronic Systems Magazine 32(12):30-34 https://www.researchgate.net/publication/322671712_Spectrum_utilization_Sense_and_adapt_Operation_on_a_noninterference_and_nonprotected_basis نسخة محفوظة 2021-08-20 على موقع واي باك مشين.
- https://maerospace.com/maerospace-acquires-rights-to-long-range-radar-system-international-organization-assumes-responsibility-for-engineering-manufacturing-sales-and-deployment-of-third-generation-hfswr/ نسخة محفوظة 2021-08-20 على موقع واي باك مشين.
- On Onera web, the French aerospace laboratory, one can find information about Nostradamus نسخة محفوظة 31 July 2010 على موقع واي باك مشين. and a movie presentation on YouTube.
- "The STRADIVARIUS OTH Radar". مؤرشف من الأصل في 2016-08-22., DIGINEXT
- Li، Le-Wei (1998). "High-frequency over-the-horizon radar and ionospheric backscatter studies in China". Radio Science. ج. 33 ع. 5: 1445–1458. Bibcode:1998RaSc...33.1445L. DOI:10.1029/98RS01606. مؤرشف من الأصل في 2021-06-10.
- John C. Wise, "PLA Air Defence Radars", Technical Report APA-TR-2009-0103, January 2009 نسخة محفوظة 2021-06-10 على موقع واي باك مشين.
- Over-the-Horizon Backscatter Radar #91; OTH-B #93 نسخة محفوظة 2020-11-12 على موقع واي باك مشين.
- نسخة محفوظة 2017-01-01 على موقع واي باك مشين.
- نسخة محفوظة 2016-05-06 على موقع واي باك مشين.
- OTH-0100 radar Technical chart نسخة محفوظة 2019-12-13 على موقع واي باك مشين.
- Singh, Rahul (9 Mar 2009). "DRDO claims to better US, Russian missile defence". Hindustan Times (بالإنجليزية). Archived from the original on 2021-06-29. Retrieved 2021-06-22.
- Richardson, Jack (1 Jun 2020). "India Ready to Install Ballistic Missile Defence". European Security & Defence (بالإنجليزية الأمريكية). Archived from the original on 2021-06-28. Retrieved 2021-06-22.
- Ray، Kalyan (9 سبتمبر 2019). "'We'll become self-reliant in radars, sonars in 5 yrs'". Deccan Herald. New Delhi. مؤرشف من الأصل في 2021-06-24. اطلع عليه بتاريخ 2021-06-22.
- "OTH Super Eyes to monitor Dragon's movement in IOR". 15 يونيو 2021. مؤرشف من الأصل في 2021-06-28. اطلع عليه بتاريخ 2021-06-22.
- "High Frequency Surface Wave Radar -HFSWR | Maerospace Corporation". maerospace.com. مؤرشف من الأصل في 2021-08-20. اطلع عليه بتاريخ 2020-10-28.
- Senator Robert Hill, Landmark Land Use Agreement For High Frequency Surface Radar نسخة محفوظة 9 September 2006 على موقع واي باك مشين., Ministerial Press Release 33/2004 from the Australian Department of Defence, 25 February 2004
روابط خارجية
- أنظمة الرادار على الموجات القصيرة ، قائمة شاملة لأنظمة OTH وأنظمة الرادار المماثلة التي تم جمعها بواسطة Wolf Hadel ، أغسطس 2013
- منظور كندي على الرادار عالي التردد عبر الأفق - ورقة بقلم RJ Riddolls ، Defense R&D Canada ، أوتاوا
- تطوير الرادار عبر الأفق في أستراليا - ورقة بقلم دي إتش سينوت على موقع وزارة الدفاع الأسترالية على شبكة الإنترنت
- رابط خرائط جوجل - رادار «ستيل يارد» الروسي قرب تشيرنوبيل.
 بوابة ملاحة
بوابة ملاحة بوابة إلكترونيات
بوابة إلكترونيات بوابة الفيزياء
بوابة الفيزياء